软体机器人的柔软特性让它在和人交互的时候,相对于传统电机机器人更加安全,但特殊的驱动方式往往让他们受限于固定的电源或者气泵。加利福尼亚大学圣地亚哥分校 (University ofCalifornia San Diego)蔡盛强副教授团队用“液晶弹性体”(liquid crystal elastomer)驱动器制造“无系绳(untethered)”的软体机器人,展示了可行走的四足软体机器人和可抓取物品和拧瓶盖的软体机械手,为软体机器人的便携化和移动性做出了贡献。
1. 无系绳软体机器人
大家耳熟能详的软体机器人,大多需要连接到一个气泵(气动软体机器人)或者电源(介电弹性体,记忆合金,记忆聚合物)等,从而导致他们行动性下降,简单来说就是“跑不远”。科学家们一直在致力于研究如何去掉限制他们行动的“束缚”,即研发“无系绳(英文 untethered)”软体机器人来提高软体机器人的实用性。
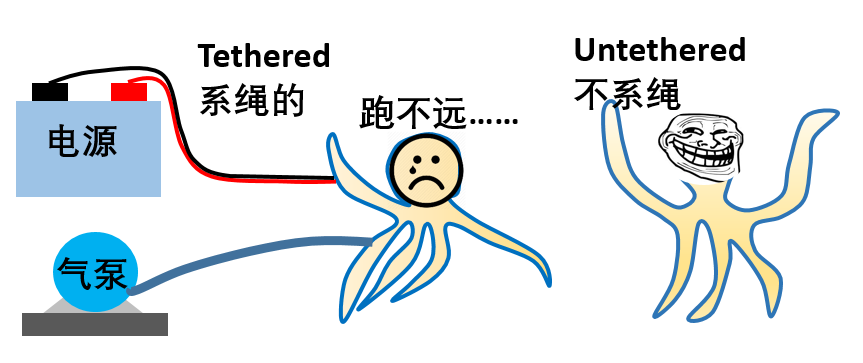
系绳和无系绳的对比
加利福尼亚大学圣地亚哥分校 (Universityof California San Diego)蔡盛强副教授团队最近提出了一种新的方法来制造“无系绳”的软体机器人,为软体机器人的便携化做出了贡献。今天小编就带大家来了解下这款由“液晶弹性体(Liquid Crystal Elastomers,简称LCE)”驱动的软体机器人技术。
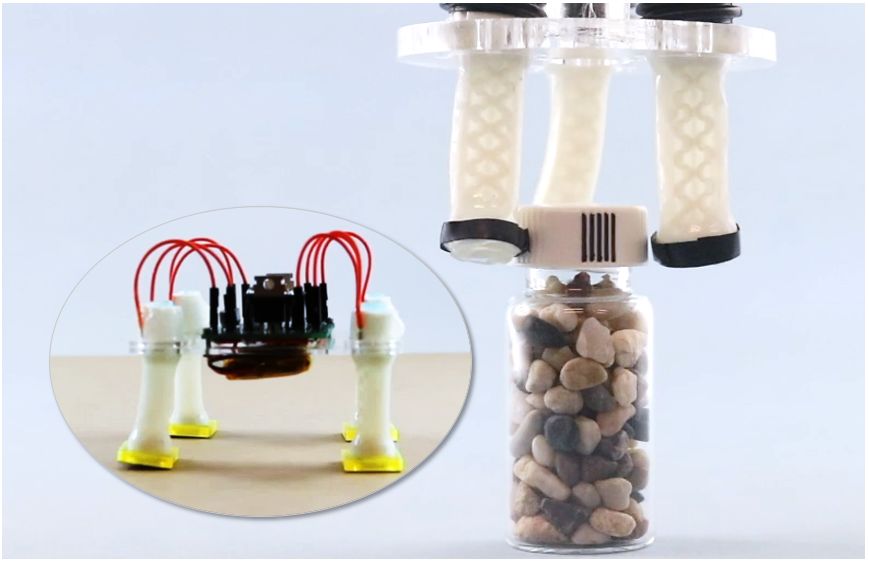
下图是该研究中展示的四足软体机器人和软体机械手。该研究于10月11日发表于science子刊《科学进展》“science advance”上。

软体四足机器人和机械手
首先,大家领略一下这两个机器人的神奇(原视频在文末)

四足机器人行走
软体机械手拧瓶盖
注:两个动图都是加速播放,四足机器人播放速度x120,软体机械手播放速度x10。该团队正在研究更快速响应的软体LCE驱动器。当前的驱动器需要大约30秒钟才能完全弯曲和收缩,最多需要4分钟才能恢复其原始形状。那是因为材料要花一些时间才能完全加热和冷却。Cai教授说他们最终目标是使执行器能够像人的肌肉一样快速收缩和放松。
2. “液晶弹性体LCE”管状驱动器
原理:该研究中提到的“液晶弹性体”(LCE, Liquid crystal elastomer)是一种把液晶分子嵌入到弹性聚合物中形成的网状结构材料。这种材料在有热或者电信号的刺激下可以改变形状,例如收缩。这种材料的特性和“肌肉在遇到神经细胞的信号时收缩”非常相似。
液晶弹性体LCE
如下图,片状的液晶弹性体驱动器可以达到40%的收缩量,和提起自身重量400倍的物体。对于软体机器人技术来说,这样的表现可以说是非常优异的!
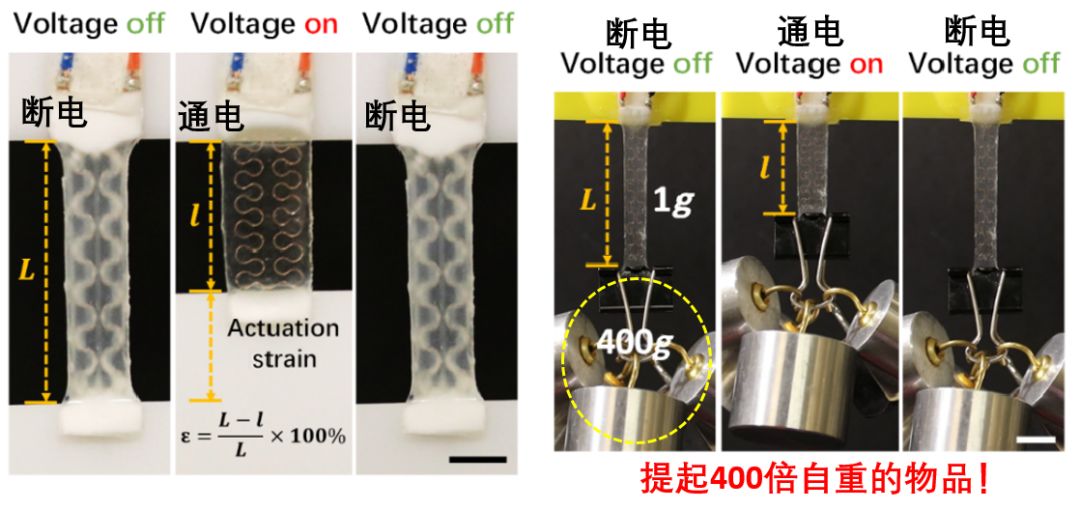
原理图
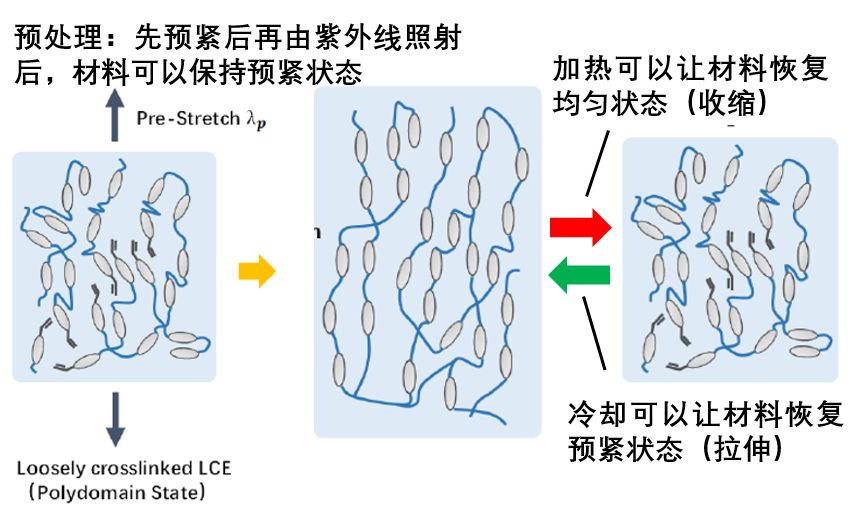
二维变三维,管状驱动器的制作:研究者首先将三根波纹形的加热丝夹在两层液晶弹性薄膜之间压缩,然后将制作好的片状材料卷成管状,之后进行一定的预拉伸,并且将其暴露在紫外线下进行照射固定形状。
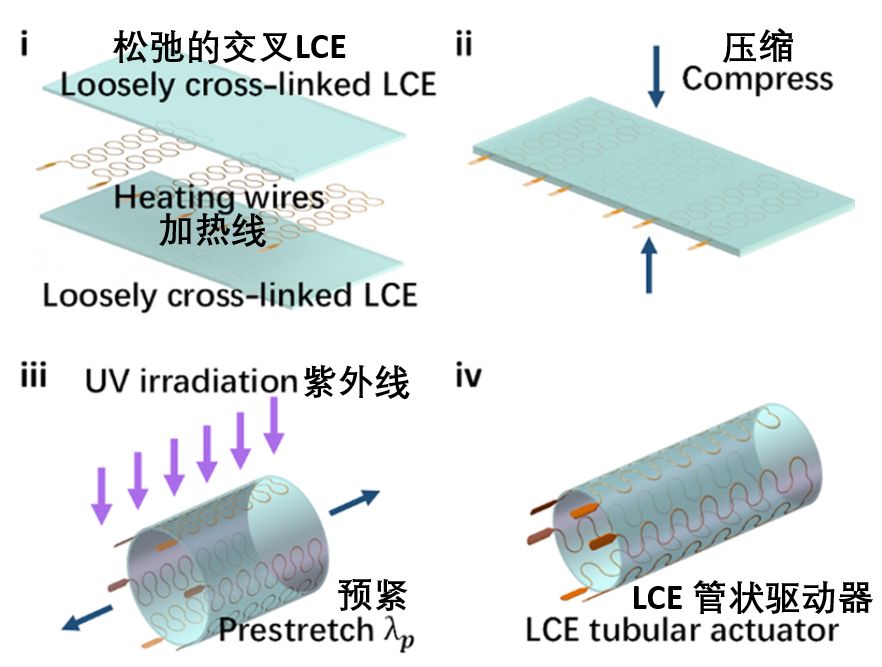
加工制造驱动器
控制:制作好后的管状驱动器中有三条加热丝,每条加热丝都可以被单独或者同时控制,从而可以控制执行器产生不同的形变。分别加热1到2根加热丝,驱动器会朝着相应的方向弯曲,同时加热3根加热丝,驱动器会整体缩短长度。
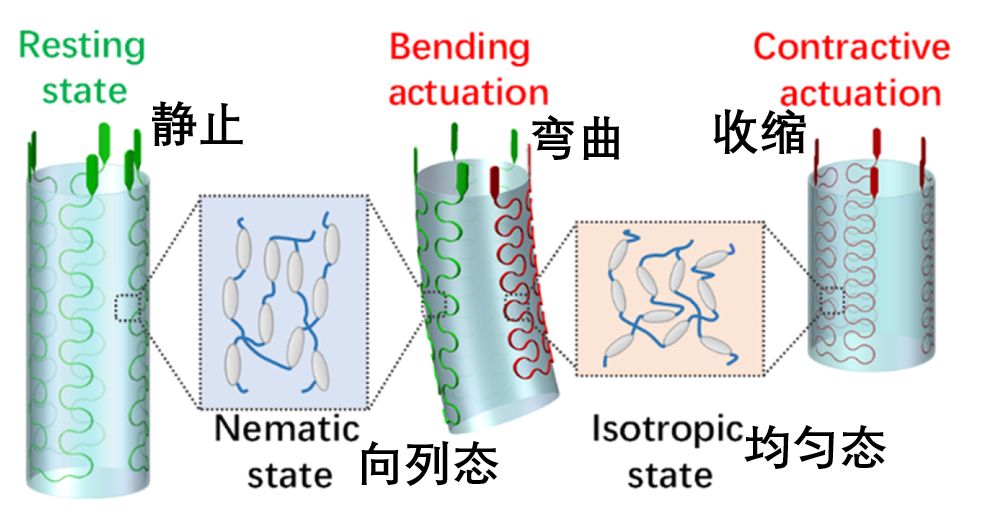
驱动器的工作原理
如下图,管状驱动器长度收缩最大可达40%,同时一共可实现6个方向的弯曲。待到关闭电源之后,等材料冷却即可恢复原状。结合了如此多的自由度以及运动模式,让这种驱动器可以被应用于不同的软体机器人执行不同的任务。
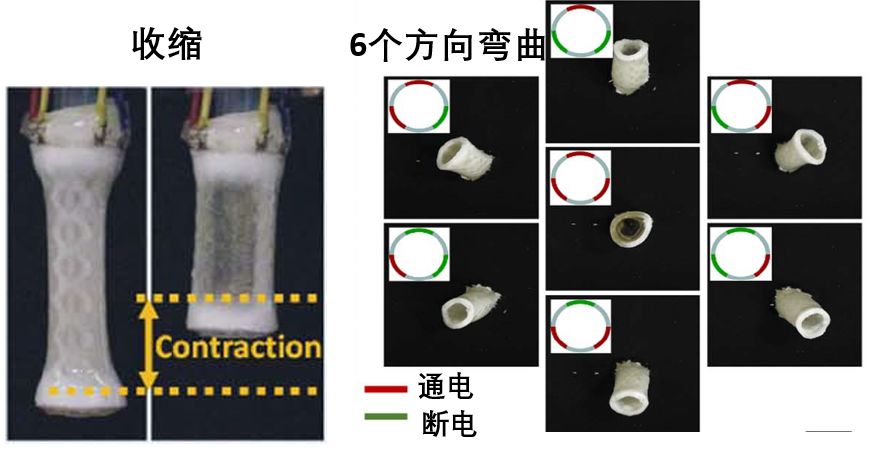
驱动器的控制及运动
3. 软体机器人和软体机械手的设计
他们将多个驱动器结合在一起构建了不同类型的软体机器人。使用四个LCE管状驱动器作为支撑腿,建立了一个“不系绳”的行走机器人。该机器人把一个锂电池(提供大约3V电压)和控制器都集成在了身体上,让其完全摆脱了固定电源或者气泵的束缚。
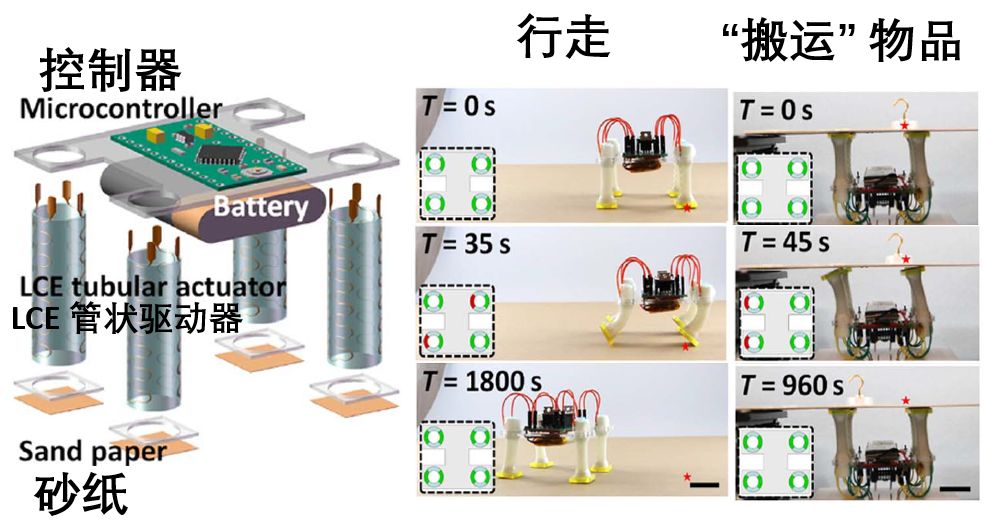
四足软体机器人设计
他们还使用三个LCE管状驱动器作为手指构建了一个软体机械手。该机械手可以被控制来实现拧瓶盖和抓取物品(50g)之类的复杂的任务。
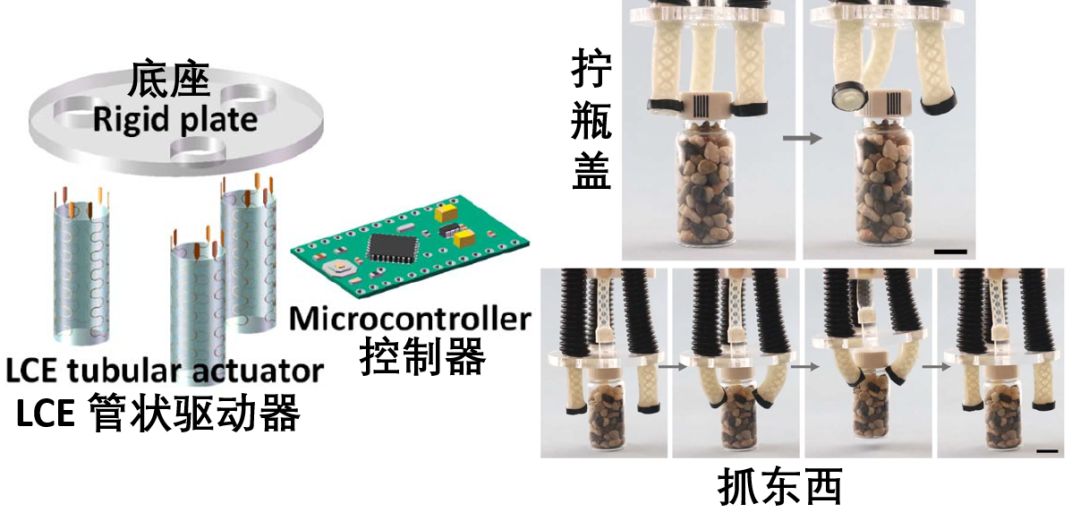
软体机械手设计
软体机器人的特殊属性让它在和人交互的时候,相对于传统电机机器人更加安全,更加柔顺,科学家们还在努力不断开发新的软体机器人技术。我们相信,未来一定会有一天,软体机器人技术一定会取代一部分传统机器人技术,走入家庭,走入护理中心,医院,陪伴老人和儿童!
原文连接:
https://advances.sciencemag.org/content/5/10/eaax5746
Science daily 报道链接
https://www.sciencedaily.com/releases/2019/10/191011142000.htm
- 南开大学刘遵峰合作团队 AM:破解液晶弹性体纤维力学-驱动-阻尼三元矛盾→揭示全新连续液晶相变过程 2026-07-10
- 斯坦福赵芮可教授团队 Nat. Commun.: 具有时空可编程表面褶皱的光热驱动液晶弹性体多功能平台用于信息编码与物体操控 2026-07-01
- 天津大学封伟教授团队 Angew: 胆甾液晶弹性体变色光子材料前沿进展 2026-06-22
- 上海交大张文明教授、同济李汶柏研究员 AFM:具有模态重编程功能的分级可重构软机器人 2024-10-21
- 华南理工大学江赛华教授课题组 Small:可光-热双模式协同作用驱动的意大利面结构软机器人 2023-12-11
- 昆士兰大学Thomas P. Davis、乔瑞瑞团队 NC:3D打印液态金属聚合物复合材料用于近红外光响应的4D打印软机器人 2023-12-04
