近年来,柔性机器人在生物医学和航空航天等各领域显示出巨大的应用潜力。其中,全柔性机器人,因其更加安全的人机互动、更好的驱动性能以及能够避免由软硬材料结合界面引起的反复故障等优点而备受关注。液晶弹性体(Liquid-Crystalline Elastomers, LCEs),因其具有优异的双向形状记忆性能及多种刺激响应性能,在全柔性机器人的制备中具有十分明显的优势。为了使液晶弹性体全柔性机器人展示出更高的灵活性和实现更加复杂的功能,通常需要将不同网络结构和化学组成的液晶弹性体材料结合,从而使其不同的部位根据不同的需求展现出不同的功能。然而,目前的液晶弹性体全柔性机器人大多基于同种材料,缺乏能够制作由多种材料构成的液晶弹性体全柔性机器人的方法。
近日,清华大学化学系危岩教授和吉岩副教授课题组提出了一种能够将不同种类的液晶弹性体材料在取向的同时进行焊接的方法,用于制作多材料液晶弹性体全柔性机器人。该方法利用巯基和碳碳丙烯酸双键的“点击反应”在室温构建多畴液晶弹性体体系,并使体系中“存有”过量的双键。这些过量的双键高温时在预先“嵌入”体系的热引发剂AIBN的引发下进行热聚合反应,进而能够同时实现液晶弹性体的取向及焊接(图1)。
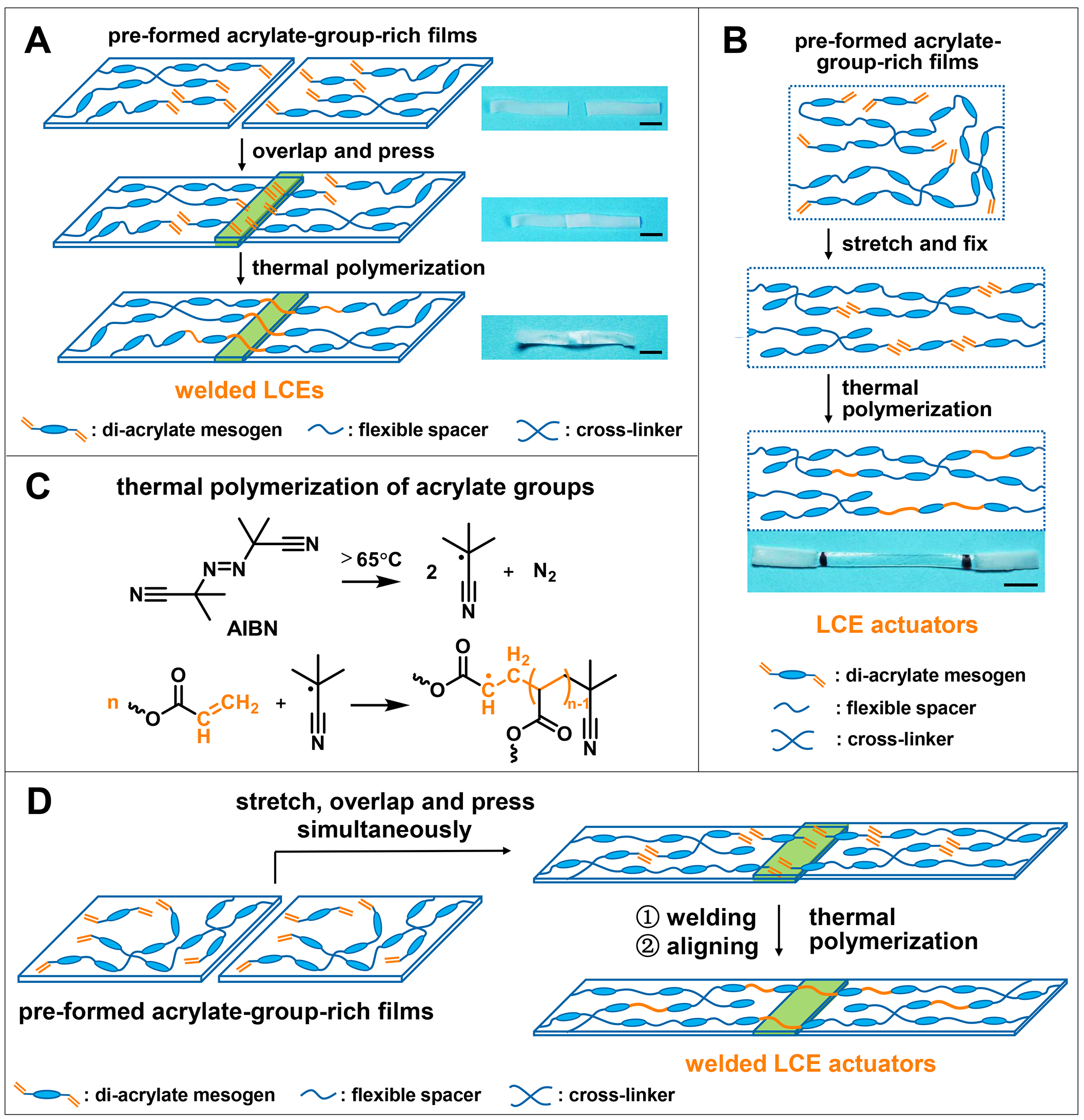
图1、LCEs的取向及焊接演示图。(A)基于过量丙烯酸双键的焊接原理演示。(B)基于过量丙烯酸双键的取向原理演示。(C)基于AIBN热引发的丙烯酸双键聚合机理。(D)通过同时“取向”与“焊接”实现单畴LCEs的焊接效果。标尺:5 mm。
使用这种基于“碳碳丙烯酸双键过量”的方法,不仅能够得到热驱动稳定性能十分优异的多种双向形状记忆模式(例如,丝带状螺旋-解螺旋、弹簧状螺旋-解螺旋、卷曲-伸直、弯曲-伸直以及凸起-平整)(图2),同时,还能够实现液晶弹性体片状样品之间的无缝焊接,当使用“同时取向和焊接”这种方法时,则能够得到结构灵活复杂且热驱动性能稳定的多种三维柔性驱动器(图3)。

图2、LCEs的驱动性能。(A)LCE-1的化学组成。(B)LCEs的双向螺旋-解螺旋热驱动模式。(C)LCEs的双向卷曲-伸直(左)、弯曲-伸直(中)以及凸起-平整(右)热驱动模式。(D)1000圈热驱动前后LCEs的驱动稳定性。标尺:5 mm。
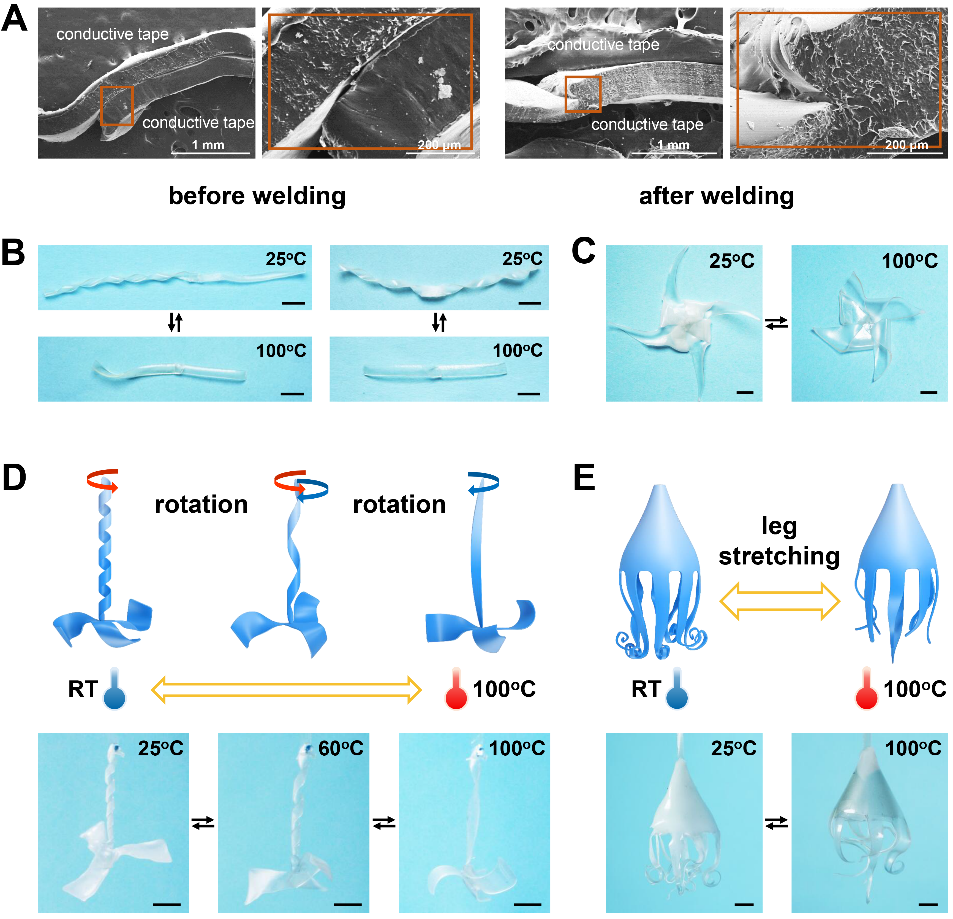
图3、焊接成功的证据及形成的三维柔性驱动器。(A)焊接前后的SEM。(B)不同双向热驱动模式的结合。(C)“风车”柔性驱动器。(D)“电风扇”柔性驱动器进行旋转运动的连续过程。(E)“章鱼”柔性驱动器。标尺:5 mm。
除了同种LCEs材料的不同驱动模式的结合,该方法还能够实现不同种类LCEs材料的焊接,以实现整体材料的多功能性(例如,能够得到可以用程序升温控制的三段式甚至多段式逐步双向柔性驱动器,以及可以对光和热进行双重响应且在光和热的刺激下驱动模式不同的复合柔性驱动器)(图4)。此外,该方法还可用于无缝焊接由完全不同的化学成分组成的完全不同体系的LCEs,以实现将所得到的柔性机器人的性质和功能复杂化,扩展其应用(图5)。
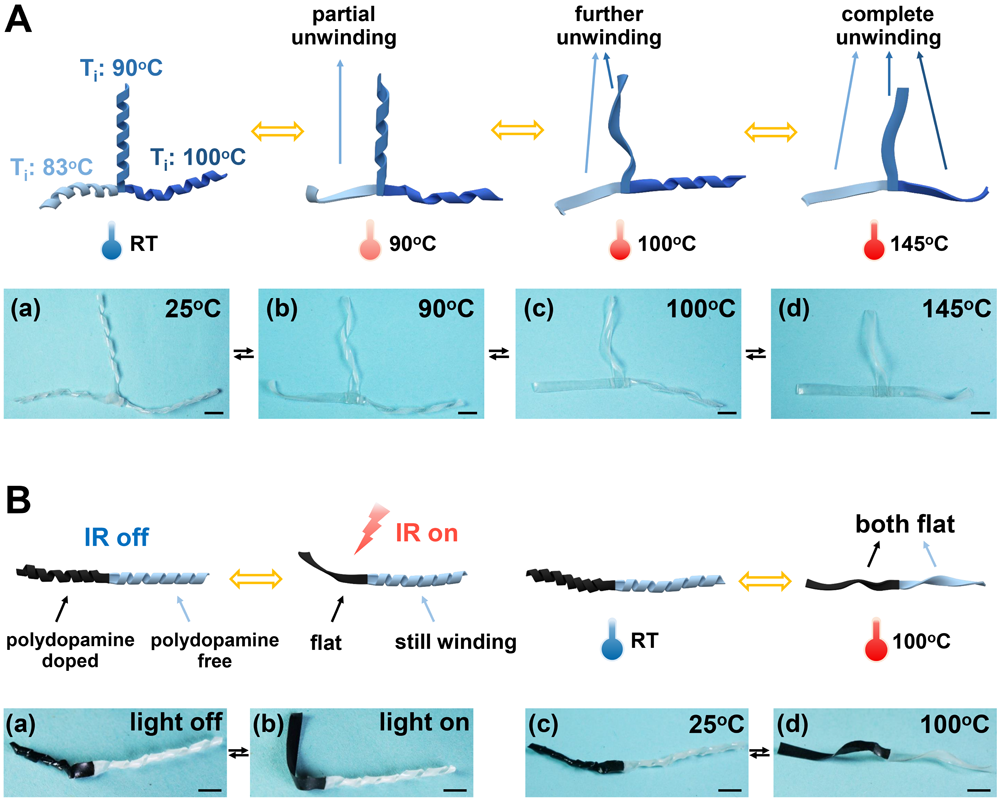
图4、焊接异种LCEs实现多功能复合柔性驱动器。(A)可用程序升温控制的三段式逐步双向柔性驱动器。(B)不同种刺激源下驱动模式不同的复合光、热双重响应柔性驱动器。标尺:5 mm。
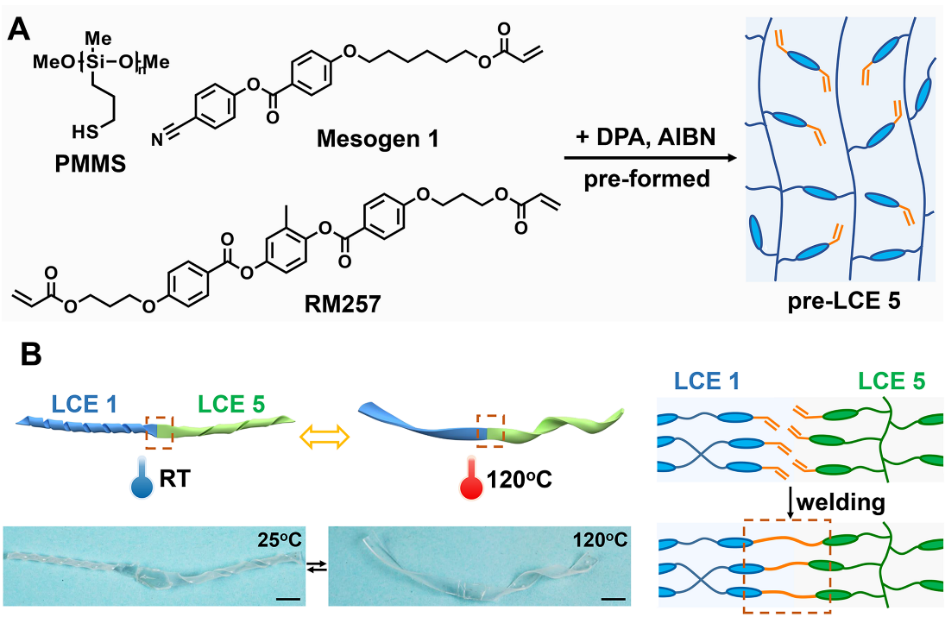
图5、完全不同体系及化学组成LCEs的焊接。(A)以PMMS为主链的完全不同体系及化学组成的侧链型液晶弹性体LCE-5的化学组成和网络结构演示。(B)完全不同体系及化学组成的主链型LCE-1和侧链型LCE-5的焊接及演示。标尺:5 mm。
这种同时作用在LCEs上的“取向”和“焊接”方法在制备三维柔性驱动器方面具有以下四个优势:1)形成的三维柔性驱动器热稳定性十分优异;2)能够形成多种热驱动以及红外光驱动双向形状记忆模式,扩展了柔性机器人的运动模式;3)焊接方法所具有的“任意性”使得该方法可以根据需求形成任意形状的三维柔性驱动器,大大拓展了其种类;4)通过双键热聚合反应的“通用性”,使得不同体系、不同化学组成的液晶弹性体能够被无缝焊接在一起,形成多功能多材料的液晶弹性体全柔性机器人,使其具有广阔的应用前景。该方法普遍适用于体系内含有过量丙烯酸碳碳双键的液晶弹性体,能够将更多由结构及化学组成不同带来的优异性能引入液晶弹性体柔性机器人的制作中,从而实现更加复杂的功能,极大扩展了液晶弹性体柔性机器人的应用。
相关结果发表在Science Advances, DOI: 10.1126/sciadv.aay8606。文章的共同第一作者为清华大学化学系张宇白博士生和王振华博士,通讯作者为清华大学的危岩教授和吉岩副教授。清华大学化学系杨洋博士、陈巧梅博士、钱晓杰博士、梁欢博士生、仵雅禾博士生和徐艳双博士参与了该研究。
论文链接:
Seamless multimaterial 3D liquid-crystalline elastomer actuators for next-generation entirely soft robots,
https://advances.sciencemag.org/content/6/9/eaay8606
- 天津大学封伟教授团队 Angew: 胆甾液晶弹性体变色光子材料前沿进展 2026-06-22
- 斯坦福赵芮可教授团队 Mater. Today:热驱动多孔液晶弹性体用于宽范围可逆声波调控 2026-06-20
- 苏科大李琳团队/南邮李炳祥团队 Adv. Mater.:具有多重刺激响应性的形状记忆胆甾相液晶弹性体 2026-05-10
- 坦佩雷大学郭洪爽博士 Adv. Mater.: 无需引发剂 - 卤键液晶弹性体打造光驱动柔性驱动器 2025-05-31
- 北大刘珂团队与合作者 Adv. Mater.:可用于深水驱动的仿生人工肌肉 2024-05-03
- 浙大赵朋/张承谦课题组 Addit. Manuf.:磁场辅助增材制造柔性驱动器 2024-02-06
