仿生的人工肌肉驱动器已经受到了广泛的关注。其中,介电弹性体驱动器由于其变形快速且可寻址(独立控制)的特性,已成为一种非常具有前景的人工肌肉技术。生物肌肉由取向的柔性驱动单元组成,因此可以产生具有方向性的线性驱动行为;而合成弹性体通常是各向同性的,因此单层的介电弹性体驱动器通常只能输出无方向性的平面扩张变形,这限制了其实际应用。
针对这一挑战,浙江大学化工学院罗英武教授团队使用先前团队报道的“力热训练”手段(Mater. Horiz., 2021, 8, 2834; Nanoscale, 2020, 12, 7514.)制备了本征各向异性的三嵌段共聚物弹性体(SBAS)薄膜,并通过卷绕法制备了具有阿基米德螺旋多层结构的介电弹性体纤维驱动器,利用弹性体的各向异性限制纤维驱动器的径向变形并增强其轴向变形。理论分析和实验结果均表明,适当的正交模量比(~2.8)即可实现显著增强的方向性输出:各向异性纤维驱动器在900 V的电压下可以实现6%的线性轴向驱动变形,是各向同性纤维驱动器的两倍。由于SBAS的自粘结性,各向异性驱动器可以组装为纤维束,这使得驱动器的力可以得到线性放大。更重要的是,纤维束中单根纤维的独立且可编程的控制可以实现伸长、弯曲、旋转等多种变形模式。
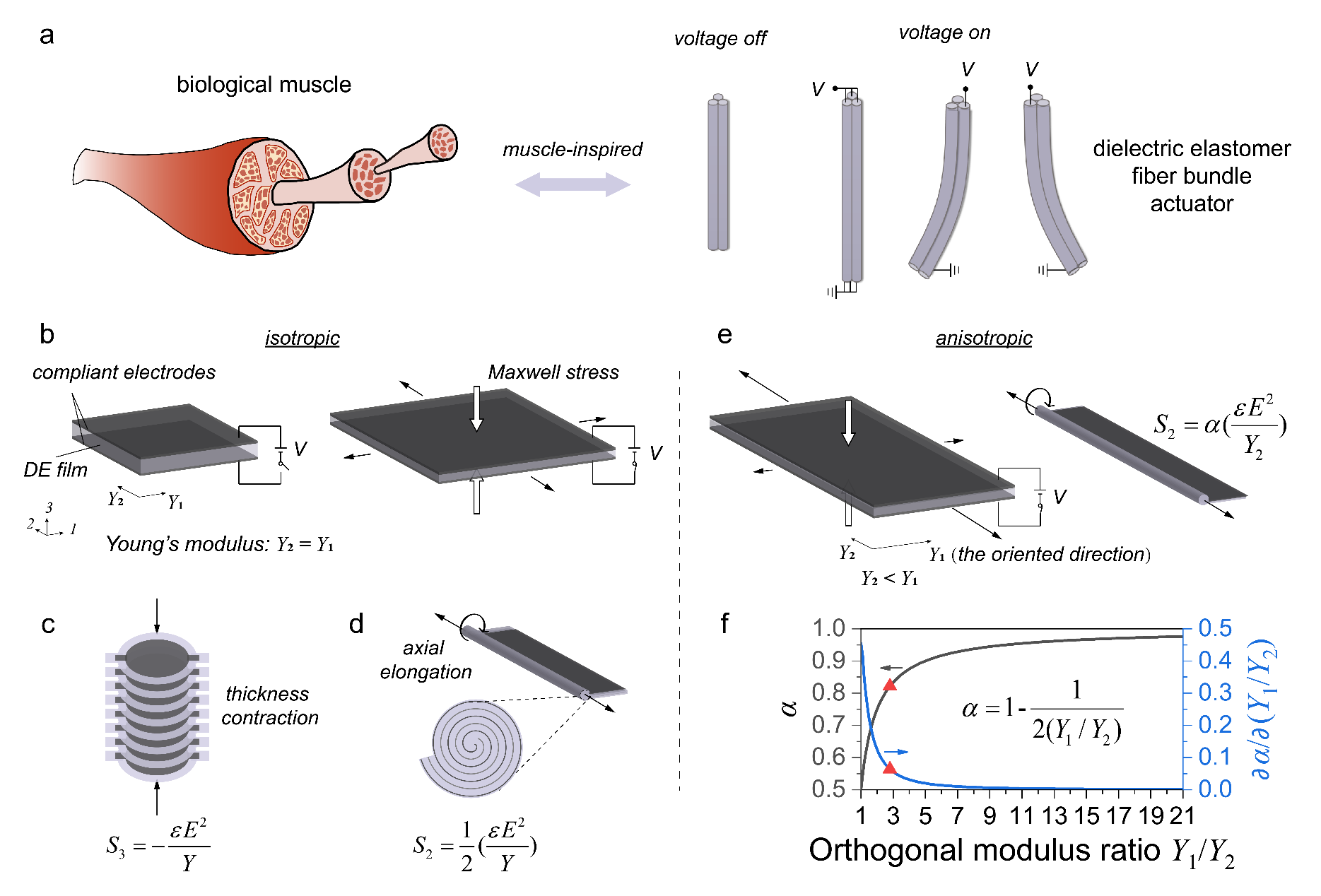
图1. 仿生各向异性介电弹性体纤维驱动器

图2. 本征各向异性三嵌段共聚物弹性体的制备与表征
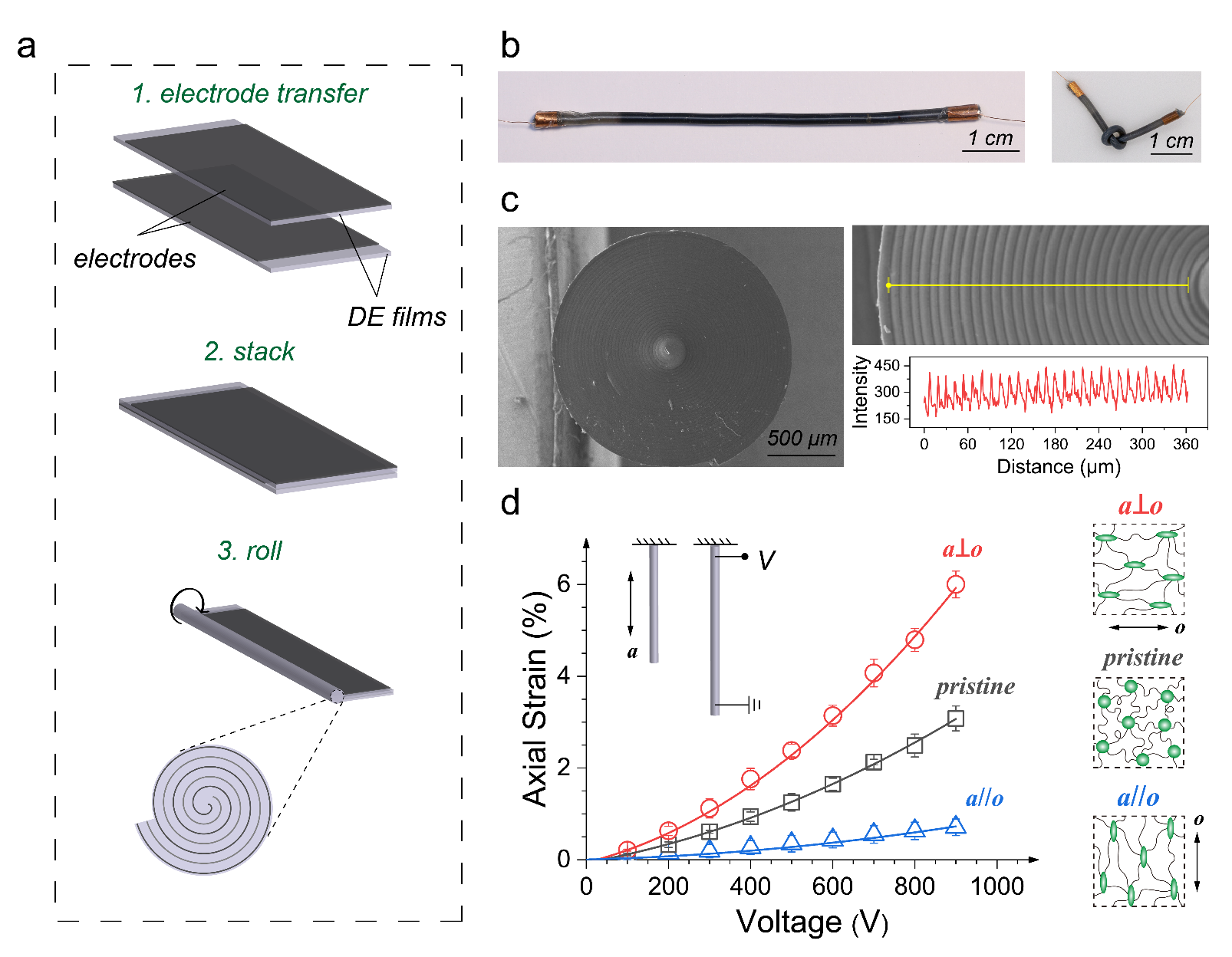
图3. 各向异性纤维驱动器的制造和驱动行为
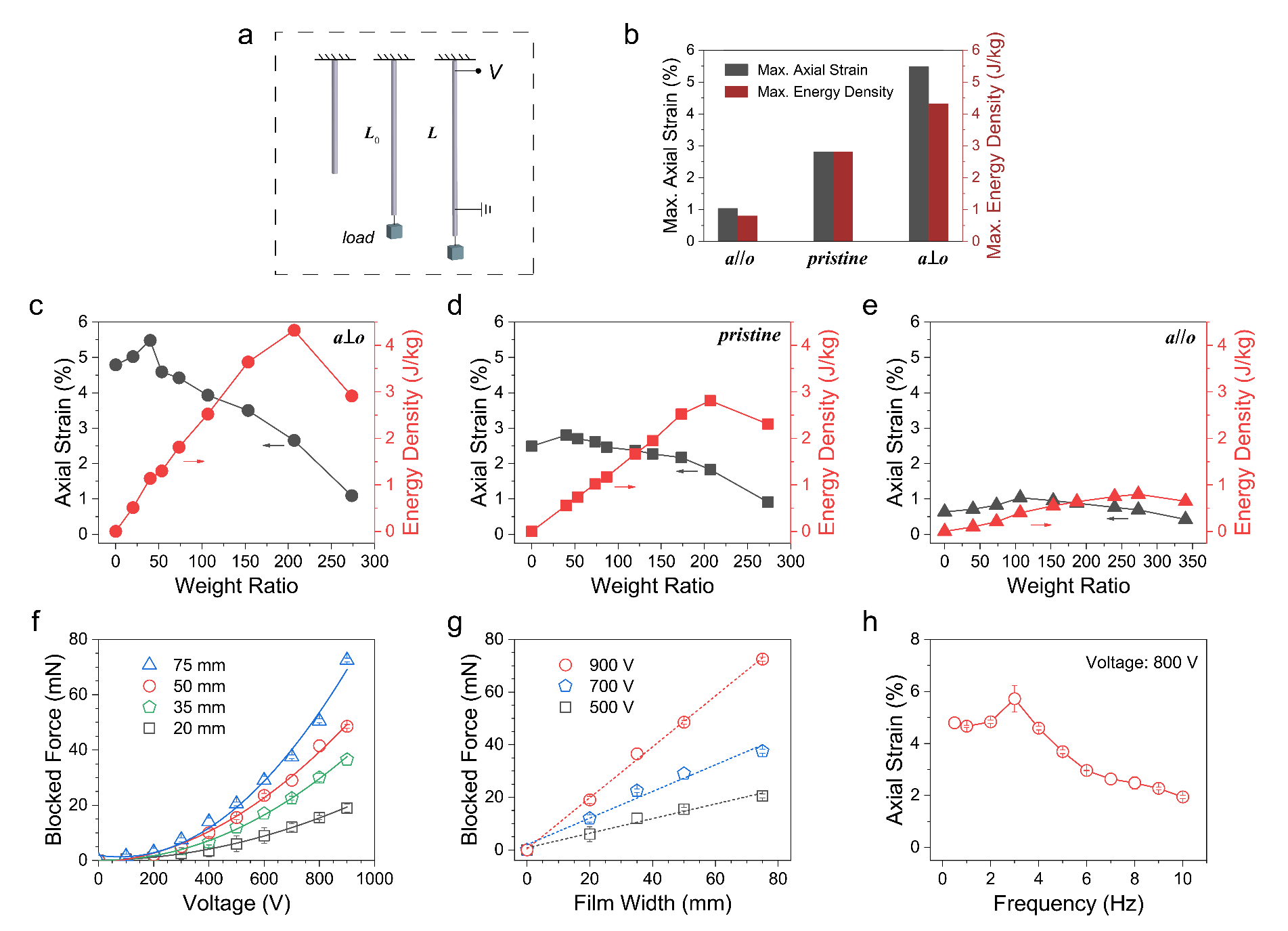
图4. 各向异性纤维驱动器负载下的驱动行为以及力、能量输出
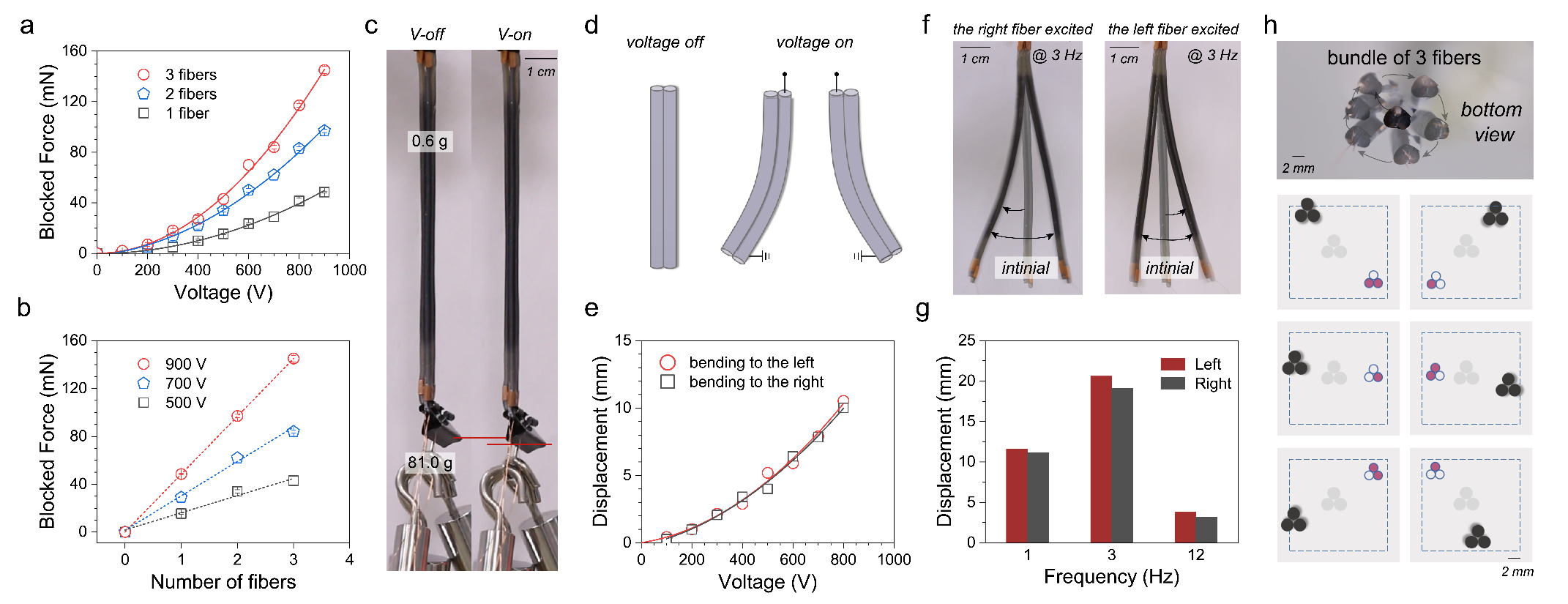
图5. 各向异性纤维束的力输出以及多种变形模式
相关研究结果以“Intrinsically Anisotropic Dielectric Elastomer Fiber Actuators”为题,发表于《ACS Materials Letters》杂志上。论文共同第一作者为浙江大学化工学院博士生何金、陈哲琪、肖友华(现于浙江农林大学化学与材料工程学院任教),通讯作者为罗英武教授。
论文链接:https://pubs.acs.org/doi/10.1021/acsmaterialslett.1c00742
- 北京化工大学杨丹教授 Nano Energy:基于强界面结合力的自供电整体自愈合介电弹性体致动器 2025-04-22
- 清华大学党智敏教授团队《Nat. Commun.》:共振频率可以达到200 Hz的丙烯酸酯弹性体 2024-11-19
- 南京大学徐飞教授 AFM:具有高环境稳定性的眼压监测智能隐形眼镜 2024-04-17
- 杭师大朱雨田教授、陈建闻副教授/南开刘遵峰教授 AFM:基于多尺度亲水-疏水界面超快响应与超大形变的湿气响应Janus纤维驱动器 2025-10-18
- 东华大学熊佳庆课题组 ACS Nano:全纤维驱动器实现环境监护型智能口罩 2025-03-12
- 东华大学熊佳庆/周欣然 ACS Nano:VOC感知型全纤维驱动器 2025-02-28
- 武汉大学常春雨教授课题组 AFM:高强度、各向异性矿化甲壳素可吸收螺钉 2026-06-04
