通过其柔软身体, 软体机器人可以潜在地与人类及其周围环境进行更安全地交互。 但是,目前大多数软体机器人很难在没有人工或者计算机控制下主动和环境交互。怎样实现软体机器人的自主性甚至赋予智能以适应复杂和随机的工作环境是一个亟待解决的难题。

图1:意大利面与螺旋状液晶弹性软体机器人对比
这种软体机器人具有螺旋状结构,一种生活中独特且常见的结构,并且采用热响应的软材料液晶弹性体制作而成,从而充分发挥了独特结构和智能材料相结合的性能优势。当软体机器人被置于热的表面上时,由于接触部分的局部收缩,软体机器人得以自发的向前滚动。除了在实验室内,这种软体机器人也可以在真实的自然环境中吸收能量向前滚动,例如在车顶或者烤架上。
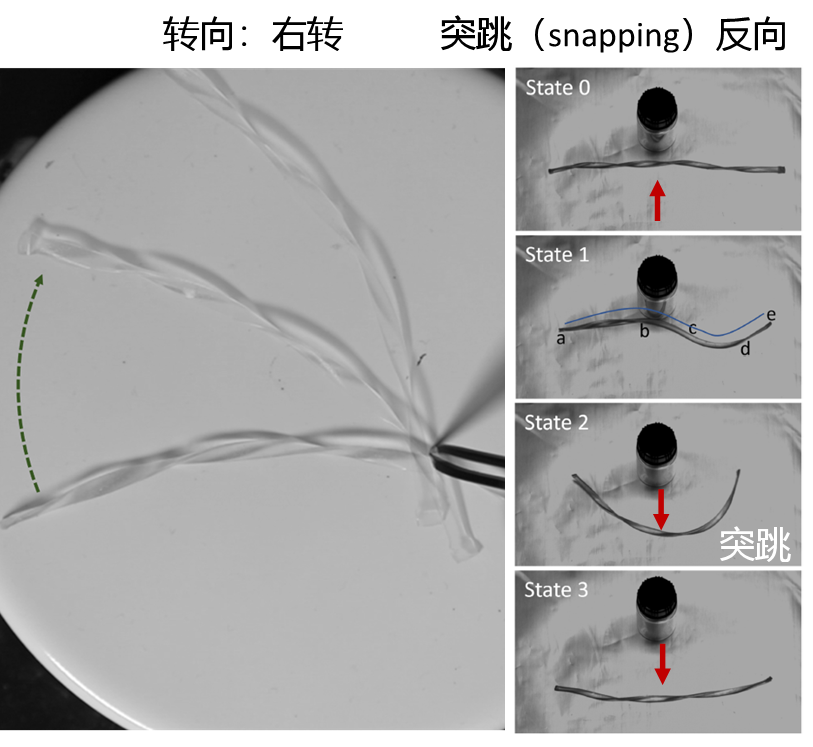
图2. 一端绕障碍转向(左)和中间位置接触实现突跳反相(右)
当软体机器人随意置于迷宫状的复杂环境中时,它将通过这两种与障碍物交互与作用的方式,来不断尝试越过或避开障碍,多次转向或反向,最终完成自主逃离(图3)。
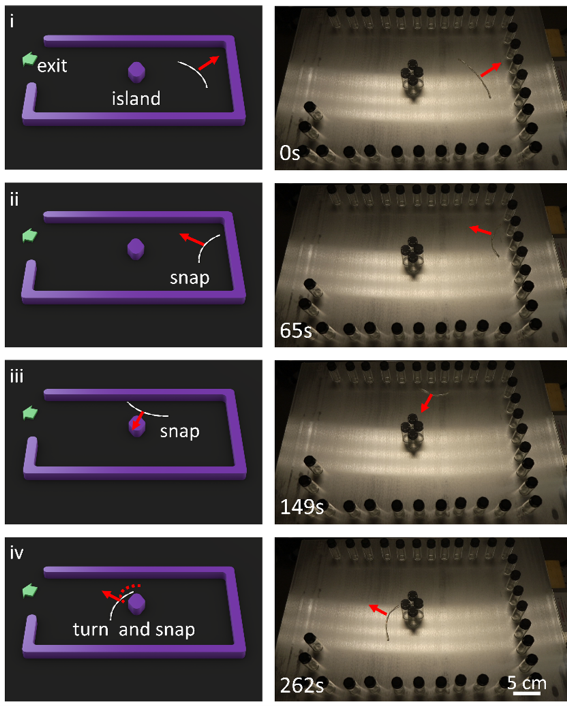
图3. 自主逃离简单的迷宫状障碍空间
值得注意的是,与现存的人工智能机器人不一样的是,这种和环境的交互并没有人工或者集成传感器的参与。这种利用了结构和材料本身实现的自主决定的智能叫做物理智能,以区别于基于计算的人工智能与生物智能。
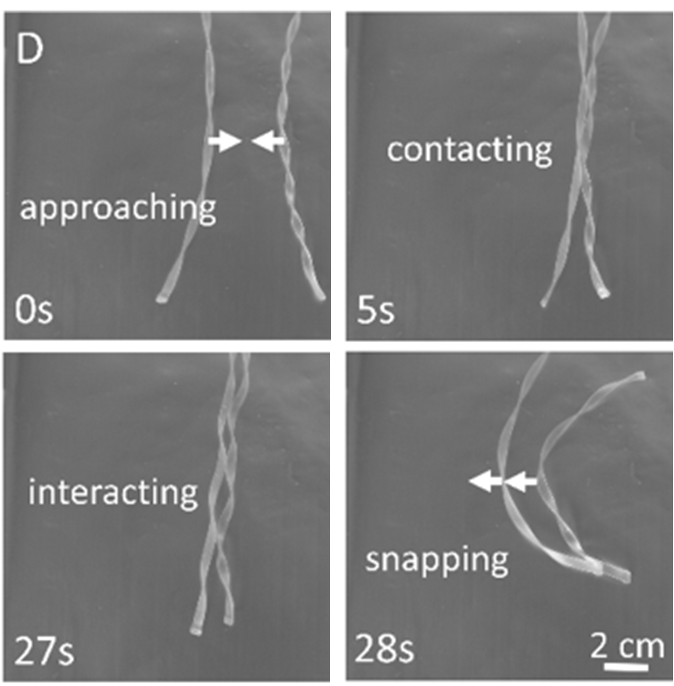
图4 两个自发滚动软体机器人相遇、接触、突跳到同向而行
除此之外,由于它像刀片一样独特螺旋状的外部轮廓,这种软体机器人还可以利用这些“刀片” 挖进柔软松散的沙里,来提高抓地力,这样在热的沙地或石子上行走时,不管是上坡还是下坡,还是过凹凸不平的沙丘,都不会发生打滑或者下陷。甚至当它身体部分被沙子掩埋时,也可以通过旋转“刀片”抖落沙子从中逃避(图5)。

图5 自发穿越各种形貌沙地而不滑落或深陷
这种在复杂环境工作的能力为今后在极端环境中的软体机器人完成自主监测提供了思路。本文以 “Twisting for Soft Intelligent Autonomous Robot in Unstructured Environments”为题近日发表于美国国家科学院院刊(PNAS)。文章的通讯作者是北卡州立大学机械航空系副教授尹杰。第一作者是北卡州立大学博士后赵耀。共同作者包括北卡州立大学博士生赤银鼎、洪尧烨、李艳滨,以及宾夕法尼亚大学教授杨澍。
文章信息:Y. Zhao, Y. Chi, Y. Hong, Y. Li, S. Yang, J. Yin, “Twisting for soft intelligent autonomous robot in unstructured environments”, PNAS, 119, e2200265119 (2022),
https://doi.org/10.1073/pnas.2200265119
团队介绍:
尹杰团队(https://jieyin.wordpress.ncsu.edu/)目前致力于剪纸机械超材料、软体机器人、以及多功能形变材料的研究。近期成果包括活性剪纸 (Adv. Mater., 2017; PNAS, 2019)与无损伤剪纸机械手(Nat.Commun.2022)、三维立体模块剪纸(Adv. Funct. Mater., 2021; Mater. Today Phys., 2021)、以及水陆两栖攀爬软机器人(Soft Robot., 2018)与高速奔跑软机器人(Sci. Adv., 2020)等。- 北航罗斯达教授 Sci. Adv.:激光编程软执行器-解锁仿生软体机器人变形定制新方法 2026-07-04
- UCLA贺曦敏团队 Sci. Adv. 封面:球形无系留自维持滚动机器人 2026-05-01
- 哈工大(深圳)朱时裴教授课题组诚招硕士、博士、博士后 - 材料、化学、物理、机械、生物工程 2025-09-17
- 石河子大学贾鑫/孙美州团队 Matter:光热响应微针纳米酶构建植物-材料生物界面 - 实现精准养分递送与氧化应激调控 2026-03-16
- 华南理工孙桃林/国家纳米中心王九令 Adv. Mater.: 热响应拓扑重构实现弹性体刚度与强度的可编程切换 2025-12-20
- 川师大赵丽娟教授、王义副教授《Mater. Horiz.》:通过一锅法构建富PDMS结构域交联的高性能逆热响应水凝胶 2025-08-22
- 香港中文大学冯伟、何奇洸助理教授和张立教授 Adv. Mater. 综述:基于液晶聚合物的物理智能软体机器人与制动器 2024-02-22
