由于两栖机器人可以使用相同的系统在陆地和水中移动,因此对安全、工业、国防和交通运输产生了重大影响。与使用螺旋桨、轮子或履带的传统两栖机器人相比,仿生两栖机器人可以进行更好的伪装。而软体机器人可以实现类似肌肉的驱动,更准确地模拟软生物的行为。但是对于软体两栖机器人来说,能否实现多地形适应和自主两栖登陆是其面临的最大挑战。
近日,北京大学谢广明教授课题组研发了一种3D打印的仿生两栖机器人,可以实现在各种地面条件(如丘陵地形、断裂面、光滑斜坡、石子路、沙滩、泥泞地形和水面)上运动,甚至可以进行两栖登陆。
乌龟通过四只脚的交替抬起,以匍匐运动的姿态实现直线运动。转弯时,以一条腿为轴不动,其他三只腿移动而实现转弯。乌龟在运动时,它的腿经历了从图 1b 状态到图 1c 的过渡。受此启发,本研究设计了一条仿生腿。如图 1d 和 1e 所示,仿生腿由两个垂直的气囊组成,气囊之间的连接充当仿生关节。仿生腿可以通过单一的驱动压力输入成功实现3D运动(图2)。
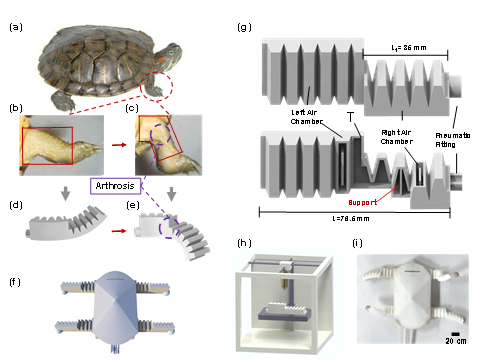

仿生腿的设计与制造,为制造经典气动致动器提供了一个新思路:通过内部预先设计支撑,以实现软材料进行3D打印(单只仿生腿的成本不到人民币1元)。并且支撑的存在也限制了充气后致动器的膨胀,实现了更大的弯曲。此外,仿生腿只需一个输入口即可实现三维运动进行移动和跨越障碍。由电机驱动的机器人腿需要两个或多个电机才能实现三维运动,很多软体机器人的腿也需要三个输入口才可以实现三维运动。减少的输入的数量也会减少气体及能源消耗,并且提高响应速度。
通过对仿生腿运动顺序的编程,可以实现不同的运动步态。学习乌龟的运动步态开发了直行和转弯步态,这使得机器人能够实现类似于乌龟的运动行为。另外,外壳的设计和制造也可以针对任何一种乌龟的形状自由设计,腿部可以被更逼真的硅胶膜覆盖,以提高生物欺骗性。
机器人的运动(包括其速度和方向控制能力)是软体机器人的基本功能之一,是评价机器人性能的重要指标。迄今为止,研究的大多数软体机器人的移动速度在 0.02 到 0.8 (BL/s) 之间。本机器人在刚性地形上具有较快的运动速度(0.97 BL/s)。软体机器人的转弯能力可以达到 25.4°/s,这是大多数具有超快运动速度的软体机器人所不具备的。如视频中展示,在陆地上,该机器人展现出了出色的综合运动能力,可以在传感器感应下实现连续自主避障。这项测试展示了机器人出色的可控性,其潜在的应用包括未知环境下的自动运动规划及自然地形的导航等。
并且,当面临狭窄通道时,该机器人可以实现原地转弯。在狭窄通道中执行任务时,这种机动性是必不可少的。
综上, 本成果展示了一种以3D打印方式开发的低成本软体两栖机器人,以及其在非结构化环境中的运动能力。与现有的软体机器人相比,该软机器人具有五个独特的优势。首先,仿生腿的设计与制造为软材料打印、中空结构制造、经典致动器设计制造提供了新思路。第二个优势是他们仅使用四个输入就完成了机器人的运动建模和六个步态的开发。第三,软体机器人出色的承重能力,显示了开发无缆的机器人的潜力。第四,软体机器人的运动能力。在同类型机器人中具有最高的地形适应性,并且直线速度最快,也是具备最快转弯速度的软体机器人之一。最后,其在非人类协助下进行两栖登陆的能力,以及对生物形态和运动方式的高度伪装,显示出其在搜索、侦察等军事领域的巨大应用潜力。
相关成果以“A Fully 3D-Printed Tortoise-Inspired Soft Robot with Terrains-Adaptive and Amphibious Landing Capabilities”为题发表于Advanced Materials Technologies上,文章的第一作者是谢广明教授课题组的博士生武明信,共同通讯作者是王晨副研究员和谢广明教授。
原文链接:https://www.researchgate.net/publication/361560126
- 中国科大李家文教授团队 ACS Nano:3D打印源自单组分前驱体树脂的超高强度、超高韧性微纳SiOC陶瓷 2026-07-09
- 西工大黄维团队官操教授 AM:数字化制备三维液态金属水凝胶 2026-05-28
- 中国科大/伍伦贡大学 AFM 封面:基于面投影光固化技术的仿生梯度抗冲击结构材料 2026-04-17
- 中国科大龚兴龙教授课题组《Sci. Adv.》:仿生石蚕蛾幼虫巢穴 - 打造高安全高性能锂金属电池的“刚柔并济”电解质 2026-07-10
- 北航罗斯达教授 Sci. Adv.:激光编程软执行器-解锁仿生软体机器人变形定制新方法 2026-07-04
- 陕科大强涛涛、任龙芳教授团队 AFM:具有应变传感和溶剂触发报警的双模态仿生自修复聚氨酯基离子凝胶传感器 2026-06-22
- UCLA贺曦敏团队 Sci. Adv. 封面:球形无系留自维持滚动机器人 2026-05-01
