柔性气动驱动器(SPA)由于其良好的生物接触安全性和便捷的驱动方式被广泛应用于医疗辅助器、工业操控手和仿生机器人等领域。现有的SPA大多以各向同性的柔性高分子作为基材,需要额外引入高强度限制材料或构建异质结构形成结构上的力学各向异性,从而控制其形变模式。现有的构筑策略难以避免造成潜在的界面问题或者降低材料的利用效率。
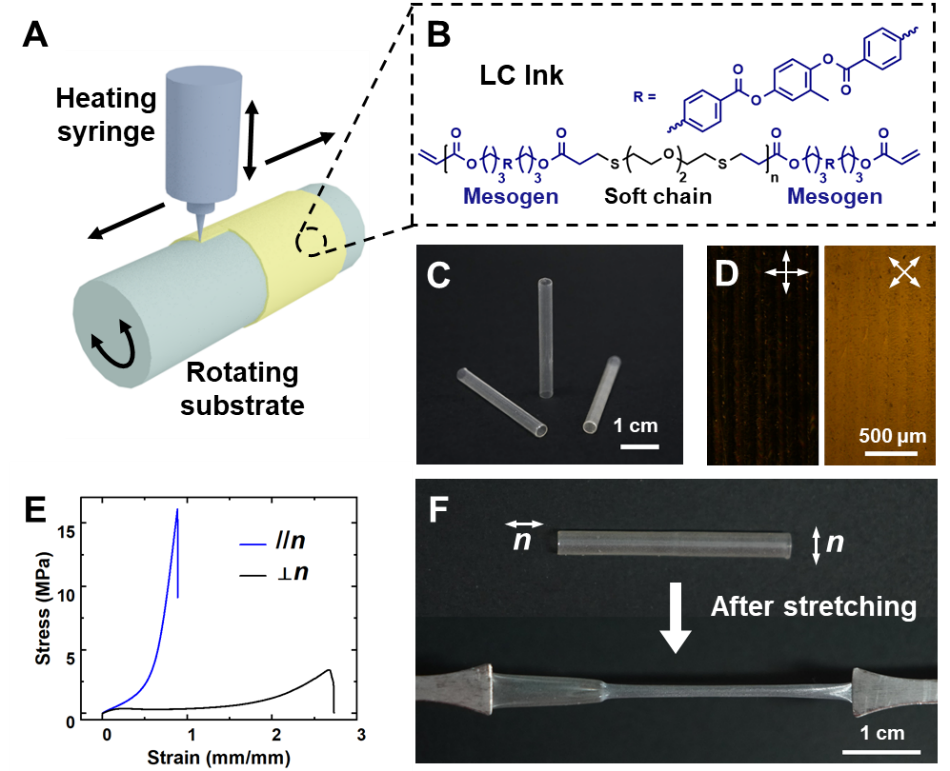
图1 3D打印构建取向可控的LCE中空管
在此工作中,他们发展一种在旋转基底上3D打印LCE的技术。相较于传统使用平面基底进行LCE打印的工作,其能一步直接构建表面取向精确可控的LCE中空管。这种利用打印构建的LCE中空管在平行和垂直取向方向展现出明显的力学各向异性。在同等应变情况下,沿平行取向方向的应力能达到垂直取向方向的40倍以上。
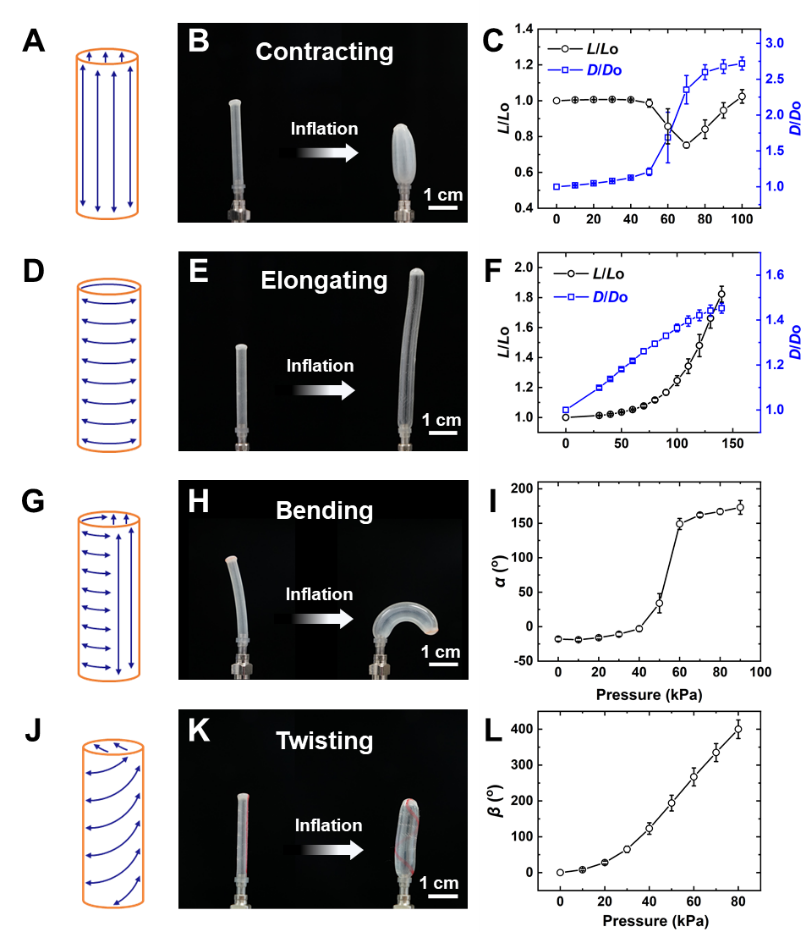
图2 不同取向的LCE-SPAs气动形变
通过对于打印路径的设计,他们构建具有可控三维取向的LCE-SPAs。这些LCE-SPAs能依据取向产生的力学各向异性实现不同设定形变——长轴缩短、长轴伸长、弯曲和扭转。
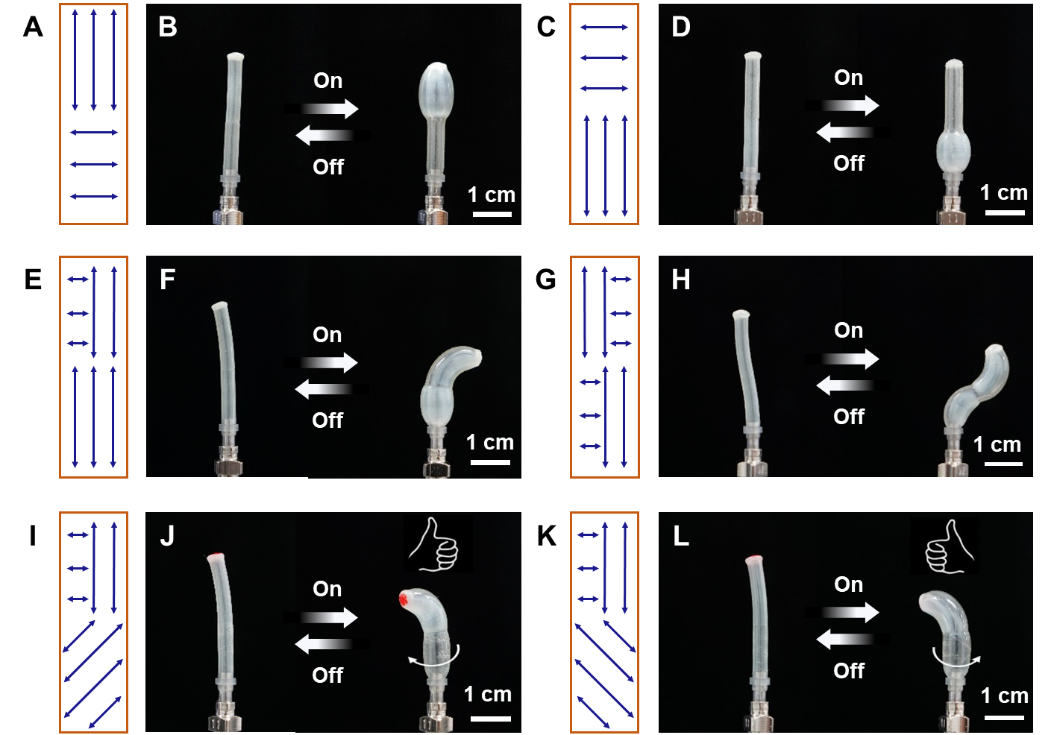
图3 具有复杂取向的LCE-SPAs的气动形变
在实际使用环境中,工作往往需要更为复杂的形变模式。这种复杂的形变可以由诸如缩短、伸长、弯曲、扭转等基础形变组合而成。在明确基础形变和取向的关系后,他们将图2中四种基础形变对应的不同液晶取向相互组合,构建具有复杂形变能力的LCE-SPAs。

图4 LCE-SPAs执行不同任务
其后他们也验证LCE-SPAs的做功能力。比如,轴向取向的LCE-SPAs在80 kPa下能提起自身重量约350倍的重物,提升至原长的80%。环向取向所构建的LCE-SPAs能在120 kPa下伸长至原长的133%,在撤去气压后回复原长。由3个弯曲形变LCE-SPAs构成的三指柔性抓手在80kPa驱动下能提起装有麦片的提篮。扭转取向的LCE-SPAs则在其下端粘附纸张作为混合浆片后,能以0.5 Hz的频率在30 s内混合均匀30 mL液体。这种通过气压驱动的LCE驱动器相较于常见的热驱动的LCE驱动器,其无需高温具有更好的生物安全性,同时也无需持续热量输入即可维持形变具有更好的能量利用效率。总而言之,此工作不仅推动了基于气动驱动的LCE柔性器件的发展,也为构建SPA提供一种新的方法和思路。清华大学化学系廖威博士生为此工作的第一作者,杨忠强副教授为通讯作者。以上工作得到国家自然科学基金和清华大学自主科研计划的资助。
原文链接:
Wei Liao, Zhongqiang Yang*,3D Printing Programmable Liquid Crystal Elastomer Soft Pneumatic Actuators,Materials Horizons,DOI:10.1039/d2mh01001a
https://pubs.rsc.org/en/content/articlelanding/2022/mh/d2mh01001a
下载:3D Printing Programmable Liquid Crystal Elastomer Soft Pneumatic Actuators
- 中国科大李家文教授团队 ACS Nano:3D打印源自单组分前驱体树脂的超高强度、超高韧性微纳SiOC陶瓷 2026-07-09
- 西工大黄维团队官操教授 AM:数字化制备三维液态金属水凝胶 2026-05-28
- 中国科大/伍伦贡大学 AFM 封面:基于面投影光固化技术的仿生梯度抗冲击结构材料 2026-04-17
- 南开大学刘遵峰合作团队 AM:破解液晶弹性体纤维力学-驱动-阻尼三元矛盾→揭示全新连续液晶相变过程 2026-07-10
- 斯坦福赵芮可教授团队 Nat. Commun.: 具有时空可编程表面褶皱的光热驱动液晶弹性体多功能平台用于信息编码与物体操控 2026-07-01
- 天津大学封伟教授团队 Angew: 胆甾液晶弹性体变色光子材料前沿进展 2026-06-22
- 中科院理化所刘静/北林王磊团队 AM:液态金属“激活”铝电池新未来!Al-LM-Ti复合负极实现39000次超长循环 - 打造高安全柔性固态铝电池 2026-07-15
