中山大学蒋乐伦教授团队和卡内基梅隆大学Carmel Majidi教授 Matter:磁控固-液相变材料
2023-02-02 来源:高分子科技
微型机器在各个领域显示出巨大的潜力,例如药物输送、实验室/芯片器官、和微电子学。与由光、电场、pH和其他刺激驱动的微型机器相比,可编程磁场驱动系统显示出精确可控和无线操控的优势。最近,研究人员在提高磁控机器人的移动性、可控性和形态适应性方面做了许多工作。一类常见的固态磁控软体机器人由软聚合物(如弹性体和水凝胶等)与嵌入的磁性颗粒组成,但是这些柔性磁控材料很难通过非常狭窄的空间。磁控液体机器人在狭窄空间表现出更大的形态适应性,然而由于液体的低强度,磁控液体机器人负载能力有限。因此,开发固-液相可切换的可编程变形、多模态运动的磁控机器人具有重要意义。
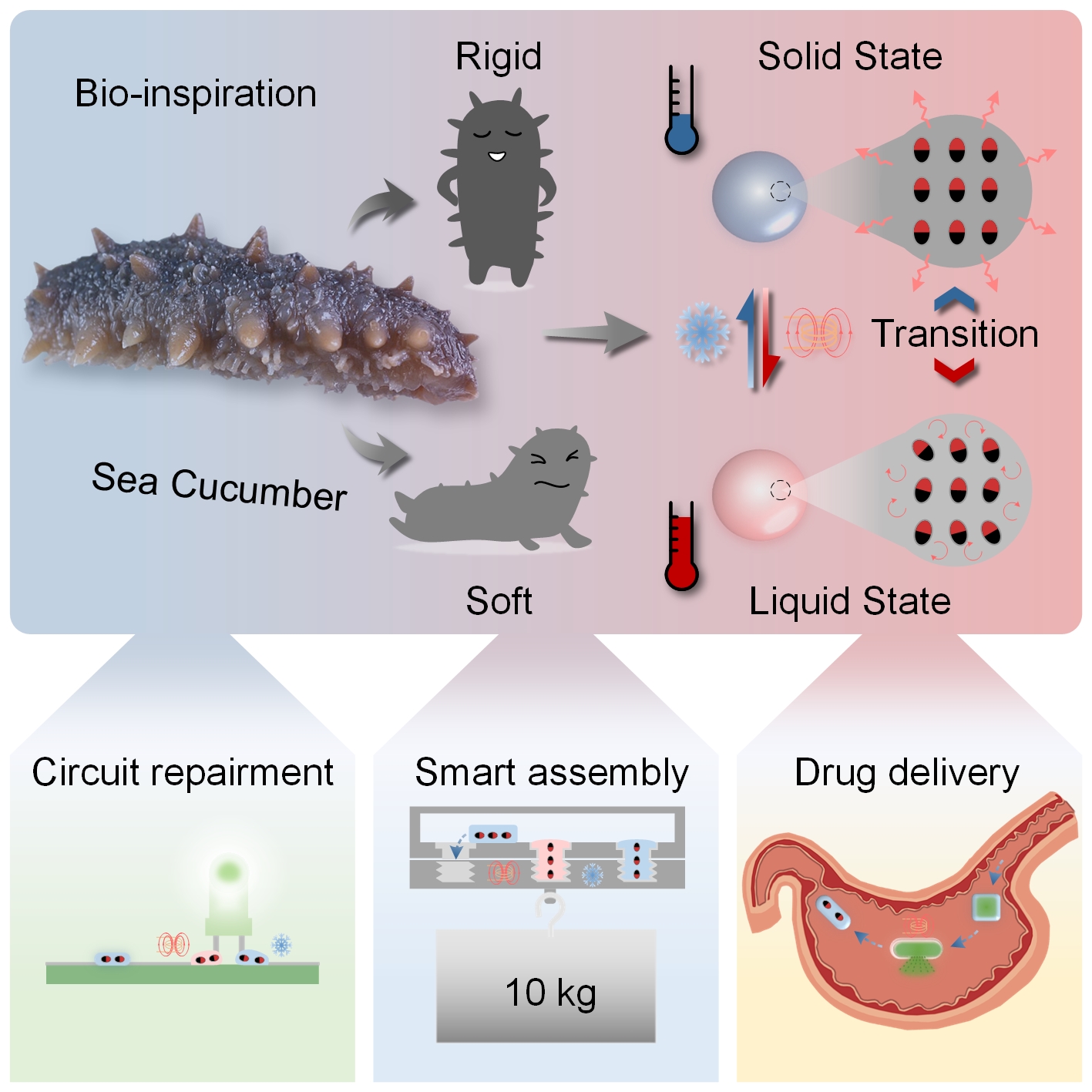
图1 磁控固-液相变材料液-固相变原理图及应用

图2. 磁控固-液相变材料表征。(a) 在加热和冷却过程中,MPTM随时间的温度变化。插图为对应的红外图像。(b) 在固态和液态下MPTM的磁滞回线。(c) 在不同驱动速度下,MPTM的跟随速度。(d) 不同体积的MPTM的变形能力(用a/b表示长径比)

Video S1磁控机器人通过液化、穿过栏杆并使用放置在栏杆外的模具重新凝固来逃离牢笼
Video S2在封闭空间中,磁控机器人组装修复电路和组装零件(负载10 kg)

Video S3在液体环境中,机器人清除异物(绿色圆球)和释放模型药物的演示
原文链接: https://www.cell.com/matter/fulltext/S2590-2385(22)00693-2#%20
版权与免责声明:中国聚合物网原创文章。刊物或媒体如需转载,请联系邮箱:info@polymer.cn,并请注明出处。
(责任编辑:xu)
相关新闻
- 东北大学田野团队 AFM:液态金属基共晶水凝胶应变传感器实现超低滞后的人机交互与高精度手语识别 2026-07-27
- 东华大学王刚、孙恒达/中科院福建物构所林悦《Adv. Mater.》:液态金属也能绝缘?高性能热界面材料新策略 2026-07-15
- 中科院理化所刘静/北林王磊团队 AM:液态金属“激活”铝电池新未来!Al-LM-Ti复合负极实现39000次超长循环 - 打造高安全柔性固态铝电池 2026-07-15
- 哈工大冷劲松、哈医大二院原慧萍 AFM:智能药物递送低共熔凝胶用于青光眼长效治疗 2026-06-14
- 中科大王育才/朱书/蒋为团队 Science:系统揭示高分子载体材料发生系统性清除的底层机制 2026-03-20
- 浙江大学王立教授、俞豪杰教授团队 JCIS:用于安全磁共振成像和刺激响应药物递送的纳米粒子 2025-09-09
