仿生干粘附结构依赖于与界面间的范德华力作用,可对不同材料和表面产生强大的粘附能力,已在运输机械臂、攀爬机器人、生物贴片等领域展现出巨大的应用潜力。尽管在结构优化和材料探索等方面取得了重大进展,但仿生干粘附材料的适应性和稳定性仍面临很大挑战。首先,在复杂非平整表面实现共形接触非常困难,尤其是一些具有极端形貌特征的物体(界面颗粒、轮廓突变的零件等)。接触不良引起的应力集中,很容易导致裂纹扩展,削弱粘附性能。此外,如何避免机器人操作中常见的振动效应对粘附状态的影响仍是具有挑战性的,这决定了抓取和运输操作的稳定性和安全性。因为即使是轻微的振动,也会使某一区域的接触状态极度不稳定,造成裂纹迅速发生并蔓延的风险。因此,提高对不规则表面的适应性,同时保持稳定的抗振动能力是推动仿生干粘附结构工程应用的关键支撑。
从“微尺度模拟”到“多尺度仿生”

图1 多尺度仿生粘附结构设计思路
多孔形态与物理切割耦合作用下的粘附机制
多尺度仿生粘附结构对于典型的非平整表面展现出良好的粘附性能。实验证明,对具有不同曲率的内凹面和外凸面,多尺度仿生粘附结构相比传统的粘附结构最大可提升一个数量级,如图2所示。更重要的是,这种提升仅在多孔形态和物理切割相互耦合时才可以达到,单纯进行物理切割或具备多孔特征的粘附结构提升效果并不明显。数值模拟进一步证实了这种耦合作用机制是来源于孔隙特征导致的低弹性模量和物理切割引起的裂纹俘获效应,当裂纹扩展到切口处会被迫重启,而低模量扩大了接触面积使得更多的物理切口参与其中,大大抑制了裂纹的扩展,提升了界面的粘附,如图3所示。此外,孔隙的存在使得整个界面的应力分布呈正弦分布,有效降低了应力集中,也对粘附过程起到了积极的作用。得益于此,多尺度仿生粘附结构对界面误差的补偿作用效果显著,无论是角度误差还是台阶误差,相比传统的粘附结构都实现数量级的提升,如图4所示。

图2 多尺度仿生粘附结构的粘附特性

图3 多尺度仿生粘附结构的粘附增强机制

图4 多尺度仿生粘附结构的误差补偿作用
结构优化设计策略
通过探索离散化程度、切口深度、顶层厚度等工艺参数对粘附性能的影响,该研究建立了多尺度仿生粘附结构的优化设计准则。实验结果表明,更高的离散化程度和更深的切口深度可以带来更好的粘附效果,如图5所示。有趣的是,顶层厚度与粘附性能之间并不是简单的线性关系,而是类似于正态分布,这可以归因于顶层薄膜的力学性能和界面粘结状态之间的权衡。顶层厚度过大,会增加抗弯刚度,降低界面的适应性。然而,当顶层厚度过小时又会削弱薄膜与衬底之间的结合强度,依然不利于高强度粘附。由于衬底层内部的纤维直径约为100 μm,因此略大于此值的顶层厚度设计不仅可以满足结合强度的要求,且可以实现弯曲刚度和柔韧性的最佳组合。此外,该研究还发现不同的孔隙率会影响多孔衬底的拉压模量,从而改变粘附性能。孔隙率越高,拉压模量的比值越大,相应的粘附性能也更加突出。

图5 多尺度仿生粘附结构的优化设计
高适应性高稳定性抓取展示
基于优异的适应性和裂纹抑制作用,研究团队针对机器人操作中的几个特殊场景对多尺度仿生粘附结构进行了应用验证。首先是面向颗粒表面的适应性抓取,如图6所示。作为一种典型的极端表面,传统的粘附结构很难实现共形接触。而多尺度仿生粘附结构可以轻松的完成抓取,颗粒被挤压在某些离散单元的底部,并不影响剩余的离散单元与界面保持有效接触,极大拓宽了粘附结构在诸如多尘等特殊环境下的应用范围。此外,研究团队还自行搭建了振动测试平台,对多尺度仿生粘附结构的抗振特性进行了验证,如图7所示。传统的粘附结构在振动环境下的粘附状态仅能维持几秒,而多尺度仿生粘附结构可以保持长达一分半钟。这是由于当系统受到振动干扰时,孔隙可以起到缓冲作用,吸收部分振动引起的能量累积。此外,物理切口的存在减弱了每个粘附单元之间产生的挤压和摩擦等机械相互作用,从而保证了整个接触区域的粘附稳定性。这种抗振动能力的显著提高有利于提升粘附结构在目标物体操作中的稳定性和安全性。
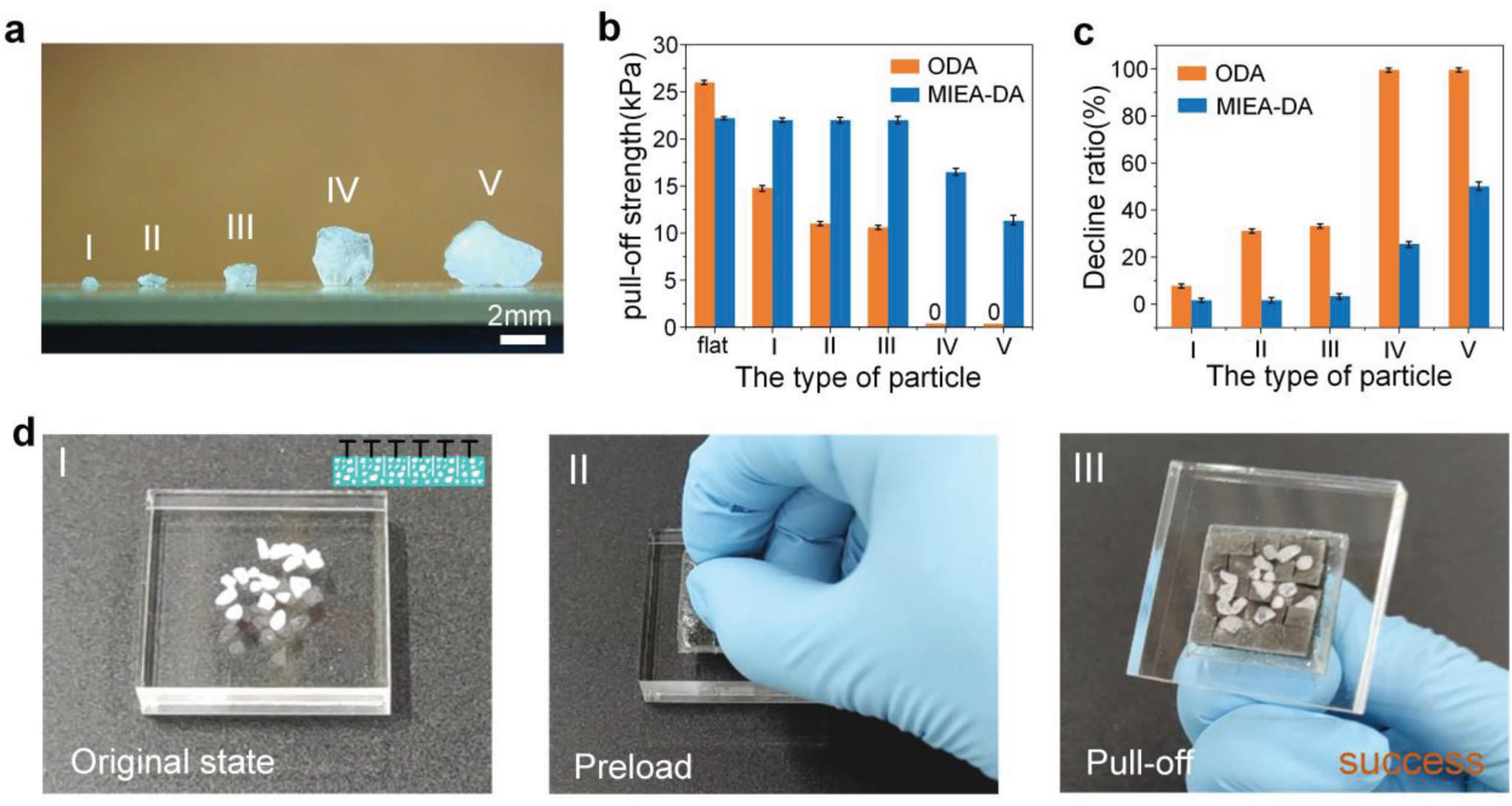
图6多尺度仿生粘附结构颗粒抓取展示
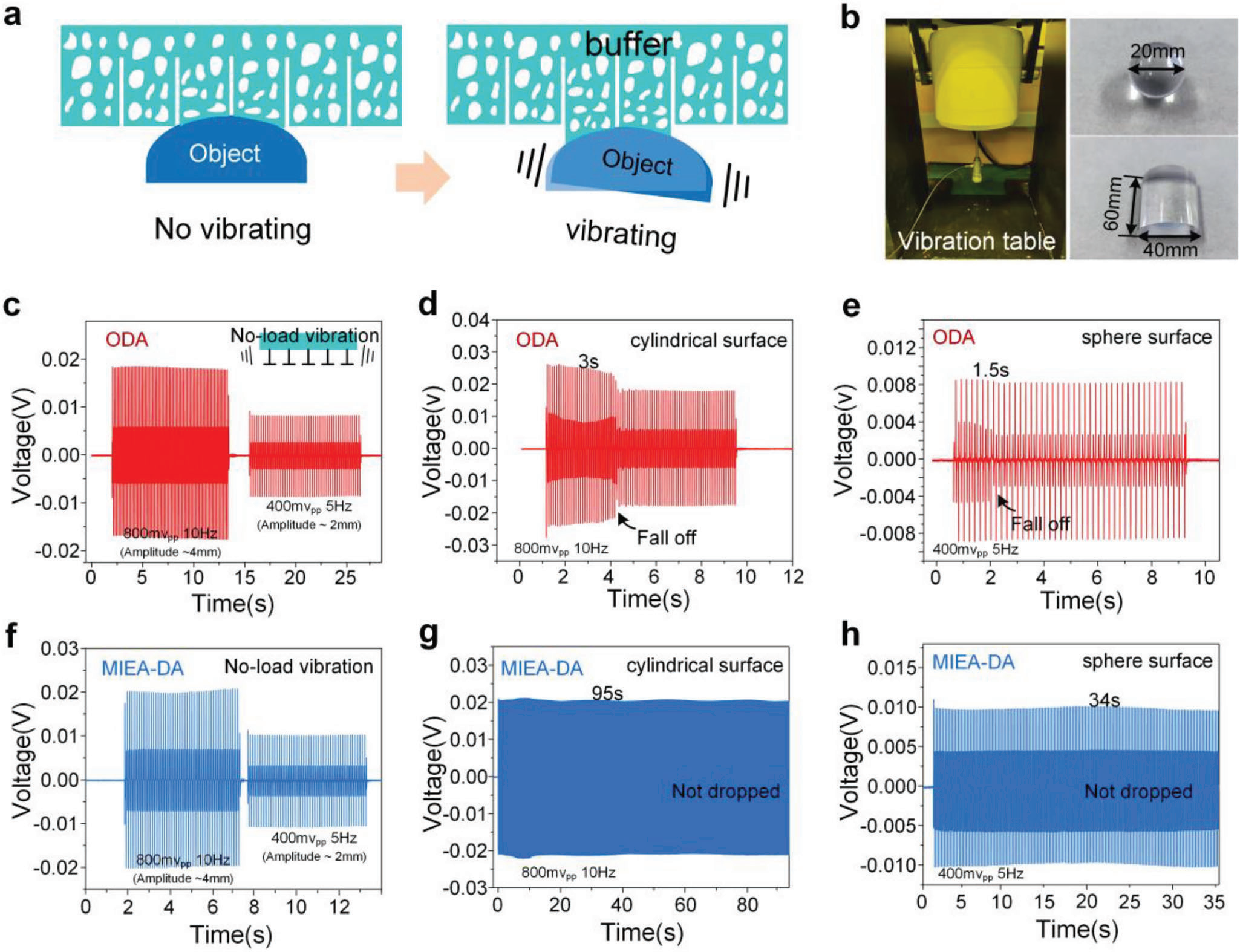
图7多尺度仿生粘附结构抗振效果展示
原文链接:https://doi.org/10.1002/advs.202302512
