清华大学刘辛军、赵慧婵 AFM:小尺寸柔性隔膜泵
2023-09-02 来源:高分子科技
小型流体泵是小型仿生机器人、可穿戴设备的关键技术之一,将小型流体泵集成到机器人或穿戴设备内部,并使其保持一定的柔性,在小型流体泵领域是个难点。

图 1 柔性泵结构示意图

图 2 柔性泵控制流体弹性体驱动器伸长与收缩

图 3 柔性泵弯曲状态性能图与应用演示
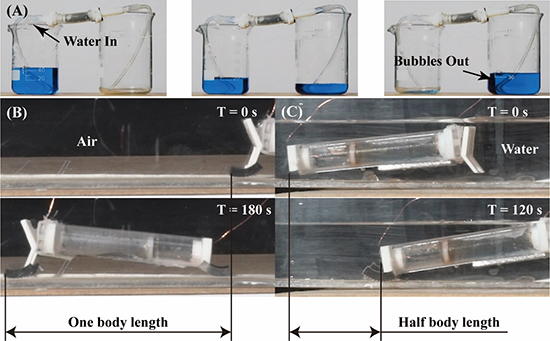
图 4 柔性泵可以驱动气体和液体工质
该工作以“Soft Pocket Pump for Multi-Medium Transportation via an Active Tubular Diaphragm”为题目发表在《Advanced Functional Materials》上,论文第一作者是清华大学机械系博士生姜淞文,通信作者为清华大学机械系刘辛军教授与赵慧婵副教授,其他作者包括中国海洋大学汤超副教授和清华大学机械系博士生东旭光等。
论文链接:https://onlinelibrary.wiley.com/doi/10.1002/adfm.202305289
版权与免责声明:中国聚合物网原创文章。刊物或媒体如需转载,请联系邮箱:info@polymer.cn,并请注明出处。
(责任编辑:xu)
相关新闻
- 中科院理化所刘静/北林王磊团队 AM:液态金属“激活”铝电池新未来!Al-LM-Ti复合负极实现39000次超长循环 - 打造高安全柔性固态铝电池 2026-07-15
- 中国科大人形机器人研究院 AM:挤-拉打印实现高界面韧性柔性传感器的一体化集成制造 2026-07-12
- 北化王瑞雪、赵潞翔/北医三院司文喆《Adv. Sci.》:用于体内递送活性物质的全柔性等离子体贴片 2026-06-29
- 北京化工大学杨丹教授 Nano Energy:基于强界面结合力的自供电整体自愈合介电弹性体致动器 2025-04-22
- 清华大学党智敏教授团队《Nat. Commun.》:共振频率可以达到200 Hz的丙烯酸酯弹性体 2024-11-19
- 南京大学徐飞教授 AFM:具有高环境稳定性的眼压监测智能隐形眼镜 2024-04-17
- 大连理工大学韩丽、舍布鲁克大学赵越 JMCA(HOT Paper):无交联策略制备热塑性液晶弹性体驱动器 2026-04-30
