川大李建树/丁春梅、理化所周亚红 Adv. Mater.:一叶扁舟清波来 - 光磁协调的净水机器人
界面漂浮机器人在载体、环境监测、水处理等领域有着广阔的应用前景。无线漂浮运动通过光、磁场、化学燃料和气动力等多种推进策略来实现。其中,光热Marangoni驱动具有响应快、成本低、环保等优点,同时超疏水特性可以降低运动过程中液/固界面之间的阻力。然而,此类水上机器人面临着两大挑战:(1)缺乏高效可控性,如极快的响应、高速的驱动行为、宽泛的表面张力适用性等;(2)长期使用中的环境适应性被忽视。虽然超疏水特性极大降低了水上运动的阻力,但同时也牺牲了表面的化学反应活性,基于超疏水表面对有机污染物的敏感性和自身催化的惰性,机器人在动态驱动中很难消除污染物。因此,开发适用于复杂环境、具有较强的可漂浮性、既能精确高效导航又能长期消除水污染物的智能机器人具有重要的意义。

针对上述的关键问题,四川大学李建树教授/丁春梅副教授和理化所周亚红副研究员近期报道了一种智能自清洁超疏水机器人,该机器人由复合矿物组装体集成,具有精确高效的导航轨迹、稳定的可漂浮性以及基于光和磁协同的催化降解能力(图1)。为了解决高效运动和超疏水催化活性之间的矛盾,利用磁场在高分子膜上仿生矿化构建了具有分级微/纳米结构的铁氧矿物-Bi2S3复合层(图2),并进行适当程度的疏水修饰,从而同时实现了超疏水特性和表面纳米活性区域的保留。值得注意的是,对矿化中间体的精细调节使得复合矿物在表面进行独特的分级组装,这带来了显著的光热、磁性和自清洁性能。基于此,水上机器人在光的协调下,利用热Marangoni推进显示出高速稳定的运动(在300 ms的加速时间内运动速度达到51.9 mm/s,撤去光源后在200-300 ms内迅速制动),同时,磁力拓展了该机器人在任何可编程轨迹的广泛表面张力范围内的工作(图3)。更重要的是,光触发光热效果和磁感应作用的耦合,加快了催化降解中的反应速率和传质过程,并实现了铁氧矿物-Bi2S3异质结中光生载流子的有效分离(图4),使得水体污染物的降解效率比纯铁氧矿物提高了8倍。作为概念验证,模拟了分布障碍物、以及含有表面活性剂和有机污染物的复杂水域。该水上机器人可以在不同的场景下灵活切换驱动模式,完成复杂的可编程运动,并移动到污染水体进行高效的原位净化(图5)。该工作为智能的自推进式多功能设备提供了指导,并有望应用于催化、环境科学和机器人系统领域。该工作以“Light and magnetism orchestrating aquatic pollutant-degradation robots in programmable trajectories”为题发表在《Advanced Materials》上,第一作者为四川大学高分子学院2023级张鸿博博士。中科院理化所周亚红副研究员、四川大学丁春梅副教授和李建树教授为论文共同通讯作者。
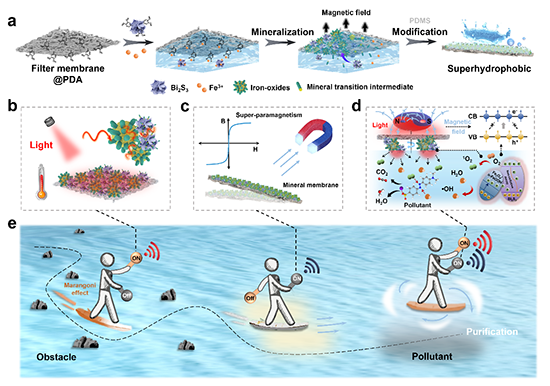
图1. 基于复合矿物膜的水上自清洁机器人的设计示意图。
超疏水复合矿物膜的制备工艺如上(图1a):铁氧矿物-Bi2S3异质结在聚多巴胺(PDA)修饰的滤膜上经磁场辅助发生自组装,然后通过聚二甲基硅氧烷(PDMS)对表面进行一定程度的疏水改性。其具有增强的光热效应和显著的磁响应(图1b-c),并且基于异质结在光-磁协同作用下,可加速降解污染物(图1d)。最终,机器人可以在具有不同表面能的水面实现复杂的运动轨迹,同时保持自清洁状态:光触发的热Marangoni驱动、磁感应运动和净化受污染的水体(图1e)。
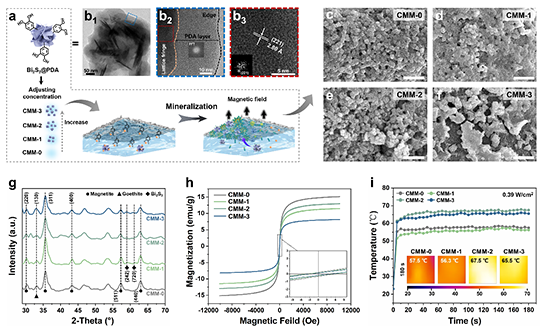
图2. 复合矿物膜的制备条件探究。
最佳的矿化条件通过调节Bi2S3@PDA的浓度来确定(图2a-b),结果表明CMM-2组别的Bi2S3@PDA含量对于其在矿物层中的集成和共组装是最优的,最终矿物层组分为磁铁矿、针铁矿和Bi2S3(图2g),并保留了分级微/纳米结构(图2c-f),显示出优异的光热性能(图2i)和显著的磁性(图2h),为后续应用提供了坚实的基础。
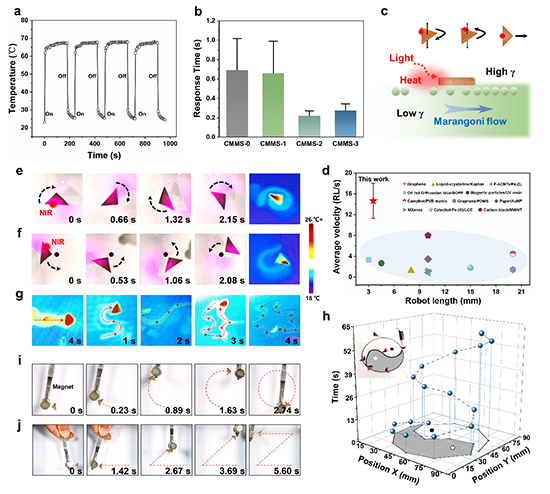
图3. 光-磁协调下的可编程轨迹。
基于具有最佳光热转换性能的超疏水CMMS-2(图3a和c),水上机器人表现出最短的响应时间(图3b)和最高的运动速度,并且与其他已报道材料体系的水上机器人的平均速度相比,该机器人速度高达51.9 mm/s,约为自身长度的14倍,处于优异的水平(图3d)。利用光驱模式,机器人可实现精细复杂的可编程轨迹运动(图3e-h),比如顺时针旋转、逆时针旋转、直线、“S”曲线、“勺子”、“滑雪运动员”、“海星”和“太极双鱼图”图案。此外,基于超顺磁性铁氧矿物,机器人可通过外部磁场驱动(图3i-j),克服了光热Marangoni驱动失效的局限。
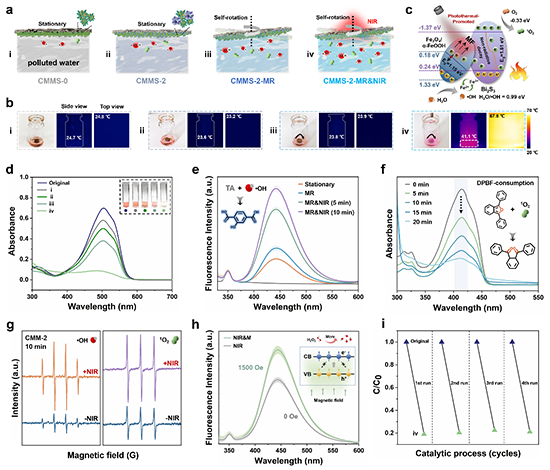
图4. 光-磁协同作用下的催化降解。
在催化过程中,除了铁氧矿物的类Fenton反应产生活性氧外,铁氧矿物-Bi2S3异质结的构建通过促进光生电子-空穴的分离进一步提高了催化效果(图4c),同时磁场能够进一步优化自旋极化电子的平行排列,抑制具有反平行自旋方向的羟基物种之间的结合,更有利于光催化性能(图4h),再协同磁力旋转和光热效应带来的反应速率和传质过程的增强(图4a-b),最终实现了优异的催化降解效果(图4d)。在该催化体系中,主要的活性物种是?OH和1O2(图4e-g)。此外,在经过催化循环后,其活性并未下降,体现出良好的稳定性(图4i),是水上机器人长期应用的保障。
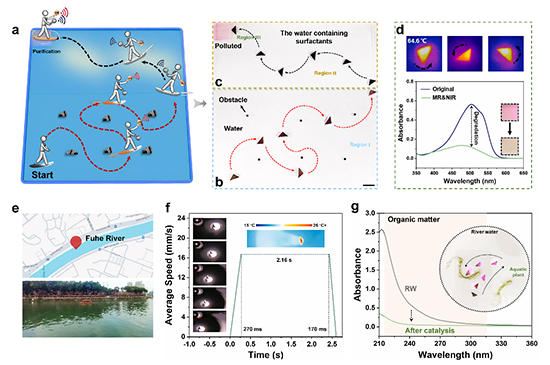
图5. 双驱动模式的水上自清洁机器人演示。
超疏水复合矿物异质结集光热、磁性和优异的催化性能于一体,使其能够在具有挑战性的条件下实现可靠的应用,比如在含有障碍物、表面活性剂和有机污染物的水体中(图5a):在水域I,机器人以光驱模式绕过水面上的障碍物(图5b),在光热Marangoni失效的水域II,机器人以磁驱模式继续运动(图5c),最终,机器人在NIR辐照和磁力旋转下对污染水体进行净化(图5d)。此外,机器人在真实的河水中仍然可以保持高效的运动性能(图5e-f)和净化效率(图5g)。
该研究成果已授权中国发明专利(专利号:ZL202210900642.1)。该项工作得到国家自然科学基金(基金号:52373295,51925304,21988102,52273135),中国科学院青年创新促进会(Grant NO. 2021029)和高分子材料工程国家重点实验室(Grant No.:sklpme 2023-2-02)的支持。
李建树教授/丁春梅副教授团队致力于仿生矿化的研究及应用,在前期研究工作的基础上(Adv. Funct. Mater., 2022, 32, 2201795; Chem. Eng. J., 2022, 429, 132491; Small, 2022, 18, 2106649; J. Mater. Chem. B, 2021, 9, 8646; J. Mater. Chem. B, 2019, 7, 5237.),提出通过控制受限空间的化学反应过程,调节晶体的成核生长,实现对矿物形貌和功能的调节,相关研究成果有望用于硬组织修复(龋病治疗、骨缺损修复)、光热、催化等领域。
详情可见课题组网站:https://www.jianshu-scugroup.com/
原文链接:https://doi.org/10.1002/adma.202311446
