近日,济南大学王鹏/河北工大孟垂舟等人在《InfoMat》期刊发表题为“Biomimetic hydrogel-based sensors with dual-mode dynamic-static tactile sensing capability enabling robotic hand for intelligent material recognition”的研究成果。河北工业大学吕钰为论文第一作者,该研究开发了一种基于仿生水凝胶的双模态传感器(BHDS),通过摩擦电传感和离子超级电容传感的协同作用,实现了机器人对材料类型和软/硬度的智能识别,准确率高达98.5%。
人类皮肤能够通过快速适应和慢适应机械感受器同时感知动态与静态触觉信号,而传统传感器受限于单一传感模式,难以实现类似皮肤的复杂感知能力。为此,研究团队受皮肤双模态感知机制启发,设计了一种集成摩擦电传感单元和离子超级电容传感单元的多层水凝胶传感器,分别独立地模拟皮肤对动态和静态触觉感知能力。将水凝胶传感器集成于机械手表面,结合机器学习算法,实现了机器人对材料类型和物体软/硬度的识别,为机器人提供了类皮肤的智能触觉感知能力。
图1展示了基于仿生水凝胶的双模态传感器(BHDS)的仿生设计灵感概念图,通过分别实现动态和静态触觉感知,模拟人类皮肤的触觉感知机制。水凝胶基双模态传感器BHDS由一个用于动态触觉检测的摩擦电单元和一个感知静态压力的离子超级电容单元组成。这种设计灵感来源于人类皮肤分别用于感知瞬态动态输入(如轻拍或滑动)、持续静态刺激(如按压)的快速适应和慢速适应的机械感受器。通过多层感知器神经网络,装备了这种仿生水凝胶双模态传感器的机械手能够智能识别材料类型和物体硬度水平。
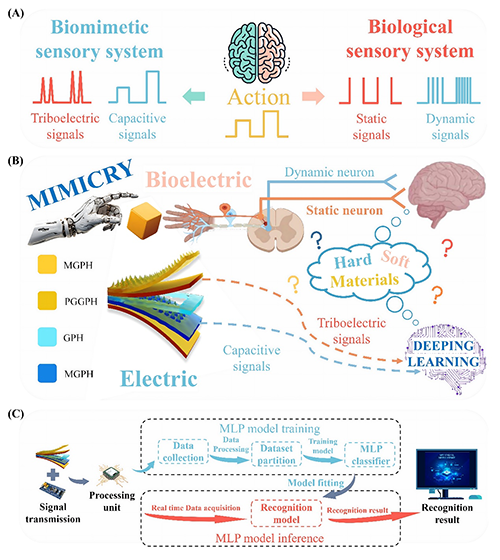
图1基于仿生水凝胶的双模态传感器(BHDS)的动态和静态触觉感知模拟人类皮肤的概念图。(A)传感器的接收机制,类似于人类皮肤。(B)集成双模态传感器的智能机械手利用机器学习和人类手部通过神经元传递系统对未知目标进行触摸探索。(C)双模态传感器BHDS传感系统与MLP神经网络集成,实现智能触觉感知。
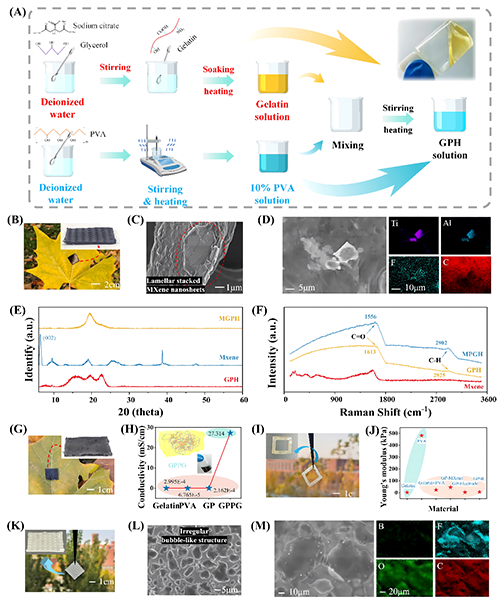
图2水凝胶基传感器各传感功能层的制备与表征。(A)GPH 间隔层的制备过程示意图。(B)摩擦层MGPH上表面金字塔形微结构的照片。(C)SEM 和(D)EDS 图像:显示 MGPH 上的层状 MXene 纳米片。GPH、MXene 和 MGPH 的(E) XRD 物相分析;(F)拉曼光谱。(G)由 PGGPH 组成的电极层照片。(H)不同水凝胶的电导率对比:明胶、PVA、GPH 和 PGGPH。(I)GPH 间隔层的照片。(J)不同水凝胶的杨氏模量:明胶、PVA、GPH、MGPH、PGGPH 和 BGPH。(K)离子型 BGPH 层上金字塔形微结构的照片。(L)SEM 图像和(M)EDS 分析:显示 BGPH 的微孔结构。
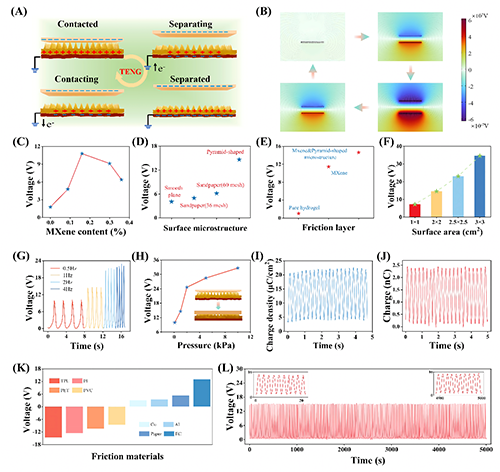
图3水凝胶传感器摩擦电传感单元的传感机制与性能表征。单电极式摩擦电传感单元的(A)工作机制;(B)COMSOL 原理仿真。水凝胶传感器摩擦电单元(C)输出电压与添加 MXene 含量的关系;(D)不同表面微结构与(E)不同类型摩擦层的输出电压对比;(F)输出电压与有效接触面积的关系;(G)响应电压波形随接触频率的变化;(H)输出电压与接触压力的关系;(I)输出电荷密度;(J)输出电荷量;(K)接触不同摩擦材料的输出电压对比;(L)5000 秒内的输出电压稳定性探究。
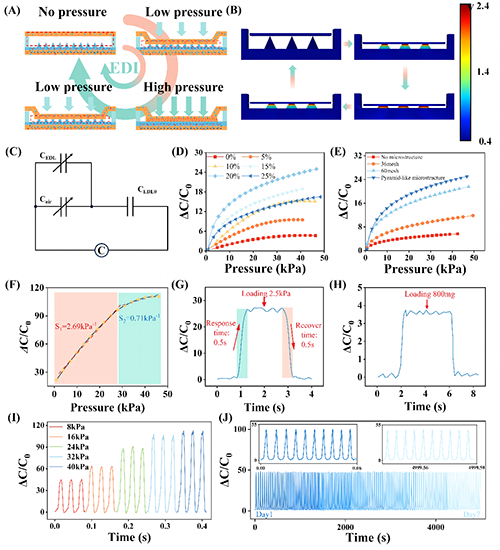
图4水凝胶传感器离子型超级电容单元的传感机制与性能表征。水凝胶传感器离子型超级电容单元的(A)工作机制;(B)COMSOL 仿真;(C)基于双电层(EDL)效应的等效电路图;(D)电容变化灵敏度与BMIM-BF4含量的关系;(E)电容变化灵敏度随表面微结构变化的响应;(F)灵敏度曲线;(G)响应时间和恢复时间表征;(H)最低检测限表征;(I)在逐渐递增的外力作用下电容响应变化;(J)在7 天内 5000 秒内电容响应变化的稳定性表征。
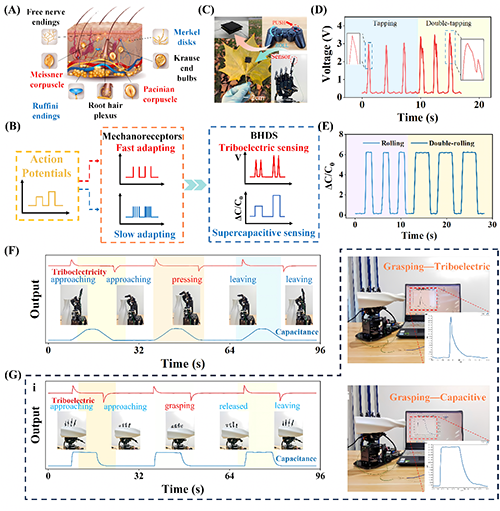
图5水凝胶传感器BHDS的双模式动/静态触觉感知验证。(A)人类皮肤通过FA 和SA受体实现自然触觉传感机制的示意图。(B)水凝胶传感器BHDS通过摩擦电动态传感单元和离子型超级电容静态传感单元模拟生物机械感受器。(C)集成水凝胶传感器BDGE的游戏手柄和机械手照片。水凝胶传感器的(D)摩擦电传感单元和(E)离子型超级电容传感单元分别在单次点击和双击触摸动作下的输出信号展示。(F)集成有水凝胶传感器BHDS的机械手对花瓶循环执行“接近接触 - 静态按压 - 释放离开”动作时的摩擦电和离子型超级电容响应。(G)集成水凝胶传感器BHDS的机械手对花瓶循环执行“接近接触 - 抓取握持 - 释放离开”动作时的摩擦电和离子型超级电容响应信号,附实验装置实拍图。
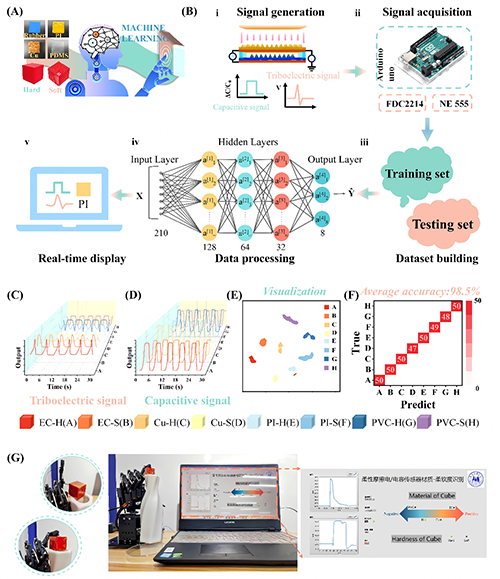
图6集成水凝胶传感器BHDS的机械手借助四层MLP神经网络实现材料特性触觉感知的演示。(A)硬/软材质识别智能传感系统的概念示意图。(B)智能识别流程示意图,包括:(ⅰ)信号生成、(ⅱ)信号采集、(ⅲ)数据集构建、(ⅳ)数据处理、(ⅴ)实时显示。(C)摩擦电传感单元和(D)超级电容传感单元接触 8 种不同立方体块时的响应信号。八类立方体块分类结果的(E)T-SNE 可视化;(F)混淆矩阵。(G)硬质PI立方体块的识别结果实时显示及对应信号波形。
论文信息
Biomimetic hydrogel-based sensors with dual-mode dynamic-static tactile sensing capability enabling robotic hand for intelligent material property recognition
Yu Lv, Zhaolei Ma, Jingle Duan, Guifen Sun, Peng Wang*, Sheng Qu, Feng Liu*, Chuizhou Meng*, Xiujuan Lin*, Teng Liu*, Shijie Guo
DOI: 10.1002/inf2.70041
原文链接:https://doi.org/10.1002/inf2.70041.
作者介绍

王鹏:济南大学机械工程学院教师,校聘青年英才岗,研究方向为柔性传感器。以第一作者/通讯作者在本领域国内外重要期刊Nano Micro Letters、InfoMat、Advanced Fiber Materials、Nano Energy、Chemical Engineering Journal、ACS Sensors 发表论文37篇(包括19篇中科院一区Top期刊,2篇ESI前1%高被引文章);累计撰写、申请发明专利17项,其中5项已授权,其余均在实质审查中;担任Exploration期刊青年编委;中国微米纳米学会高级会员;受邀担任国际SCI检索期刊Nano Energy、Chemical Engineering Journal、ACS Applied Materials & Interfaces、Advanced Materials Interfaces、Measurement等的审稿人;连续两年获得2021年、2022年博士研究生国家奖学金,2022年获得天津市创新奖学金,2023年获得河北省优秀毕业生,2018年获得天津市王克昌文化科技奖学金,2022年获得河北工业大学学术之星,2022年获得河北工业大学三好学生荣誉称号,连续两年获得2021年、2022年河北工业大学机械工程学院十佳学术之星荣誉称号;多次参加学术会议并做分会场报告。个人主页:https://faculty.ujn.edu.cn/wangpeng1/zh_CN/index/149227/list.

孟垂舟:河北工业大学机械工程学院特聘教授,博士生导师。国家海外高层次人才引进计划青年特聘专家、河北省海外高层次青年人才、河北省侨联侨界专家委员会委员。清华大学物理学学士、博士学位,曾任职美国普渡大学生物医学工程系博士后研究员、美国IBM半导体研发中心高级工程师、新奥集团能源研究院石墨烯/储能/能源新材料等技术中心主任。长期从事新型纳米材料和高分子弹性体的制备研究,以及其在能源转换与存储、生物医学传感、柔性电子皮肤、可穿戴健康设备、和健康护理装备上的应用开发。
- 中国科大龚兴龙教授课题组《Sci. Adv.》:仿生石蚕蛾幼虫巢穴 - 打造高安全高性能锂金属电池的“刚柔并济”电解质 2026-07-10
- 北航罗斯达教授 Sci. Adv.:激光编程软执行器-解锁仿生软体机器人变形定制新方法 2026-07-04
- 陕科大强涛涛、任龙芳教授团队 AFM:具有应变传感和溶剂触发报警的双模态仿生自修复聚氨酯基离子凝胶传感器 2026-06-22
- 长春工大刘鑫、张钦课题组 Angew:一种兼具高机械强度与高锌离子迁移率的可回收超分子水凝胶电解质用于稳定锌负极 2026-07-13
- 浙江大学赵骞教授、浙江省肿瘤医院张宇华团队 Adv. Mater.:在可编程的自发变形水凝胶方面取得进展 2026-07-12
- 天工大张松楠 AFM 综述:水凝胶为光伏板“退烧” - 开启水-能协同热管理新路径 2026-07-10
- 川大张新星教授团队《Chem. Mater.》:基于生物衍生可聚合低共熔溶剂离子弹性体的自修复双模态传感器 2022-12-04
