基于刺激响应材料的无系留软体机器人,能够在持续外界刺激(如光或热)下实现“自维持运动”,近年来备受关注。然而,在复杂环境中实现高效、灵活且可控的运动,仍然是该领域的一大挑战。传统的爬行、游动或滚动方式,往往存在方向受限、适应性不足等问题。自然界中,风滚草(tumbleweed)却提供了一个巧妙的解决思路:它依靠风力滚动播种,凭借球形结构可以轻松跨越各种地形。
受此启发,加州大学洛杉矶分校贺曦敏教授及博士后陈驰设计了一种名为Twirlbot的球形中空软体机器人。该机器人不仅能够实现持续自主运动,还兼具全向移动、爬坡、载物、抗风以及多地形适应等多种功能。
2026年4月29日,相关成果以“Twirlbot: Tumbleweed-inspired rolling robot”为题发表在《Science Advances》并为当期封面。
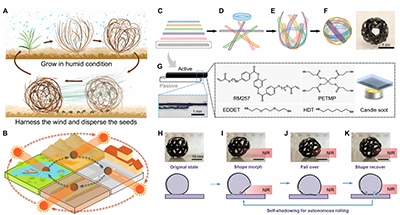
图1. Twirlbot的制备与滚动机制。
Twirlbot采用独特的编织结构,由六根双层条带交织形成球形中空框架,其中外层为光热响应的主动层,内层为提供形变恢复的惰性层。在结构上,每一根条带在交叉节点处均遵循“上下交替”的编织关系,使得各个闭合环既保持相对独立,又通过相互嵌套实现力学支撑与耦合。当局部受光产生形变时,这种拓扑约束能够将局部弯曲转化为整体协同变形,最终驱动结构实现持续滚动。
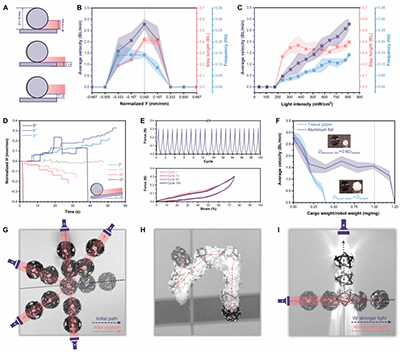
图2. Twirlbot的光控多功能性。
因此,在光照驱动下,Twirlbot表现出高度可调控的运动行为,通过改变光照的位置、面积和强度,可以分别调节其滚动步长与频率,从而实现对速度和运动模式的精确控制。同时,Twirlbot能够在光引导下实现全向运动、路径可编程、自主转向及正趋光性等行为,并具备爬坡、抗踩踏、抗风和载物运输等多种功能,这些复杂表现主要源于结构本身的设计,而非额外控制系统,体现出典型的“物理智能”。

图3. Twirlbot的潜在应用。
在接近真实环境的测试中,Twirlbot展现出良好的适应能力,能够在系列粗糙表面和复杂地形上稳定滚动,并具备跨越障碍的能力。此外,该系统还实现了多种功能性应用,例如在恒定光照下进行自主连续播种、利用日照变化实现往返运动,以及在水环境中持续滚动甚至完成水下布线等任务,显示出其在农业和环境作业中的广阔应用前景。
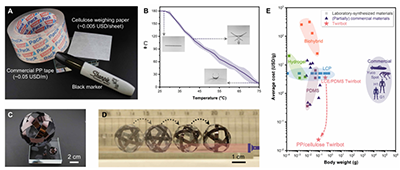
图4. Twirlbot的低成本材料体系拓展。
最后,该结构设计还可拓展至低成本商业材料,例如通过PP胶带与称量纸构建的双层条带,同样能够实现光驱动滚动及相关功能。尽管性能有所降低,但成本显著下降至现有无系留机器人的十分之一甚至更低,同时仍保持良好的尺寸扩展性与功能性,表明该设计具有良好的可推广性和规模化应用潜力。
原文链接:https://www.science.org/doi/10.1126/sciadv.aeb8948
研究团队介绍:
在过去几年中,团队有关物理智能和软体机器人的研究包括Sci. Robot. 10, eads1292(2025); Nat. Mat. 24, 116-124(2025); Nat. Commum. 16, 7630 (2025); Sci. Adv. 11, eadx7189 (2025); Sci. Robot. 8, eadf4753(2023); Sci. Robot. 6, eabd5483(2021); Sci. Robot. 4, eaax7112(2019); Nat. Nanotech. 14, 11(2019)等。此外,该团队在水凝胶高力学性能方面也有相关进展:“盐析”效应(Nature 590, 594 (2021); Adv. Mater. 2021, 33, 2007829; NPG Asia Materials, 14, 65 (2022); iScience, 24, 9, 102989, 2021), 和共溶剂效应(Advanced Materials, 35(18), 2211673; Adv. Mater. 2021, 33, 2008235;Adv. Mater. 2021, 33, 2005906;EcoMat. 2021; 3:e12085)。
- 暂无相关新闻
