液晶弹性体因响应速度快、驱动应变大,被广泛关注用于医疗器械、传感器和环境探测等软体驱动领域。要让其具备良好的可逆驱动性能,必须同时满足两大条件——合理的几何设计和精确的液晶分子取向编程。现有的取向编程方法,现有方法如光固化、机械拉伸、场致取向等均存在几何受限、加工条件苛刻或空间精确控制难度大等问题,制约了复杂三维结构驱动器的制备。
近日,浙江大学化工学院郑宁研究员团队在液晶弹性体(LCE)驱动器的制造领域取得重要突破,提出了一种基于受控自由基扩散的全新编程方法。该技术实现了对任意几何结构的液晶弹性体精准取向固定,使材料具备可逆驱动能力,被形象地称为“变形即走(deform-and-go)”策略。这一成果为软体机器人、可穿戴设备和智能材料的开发开辟了新的路径。
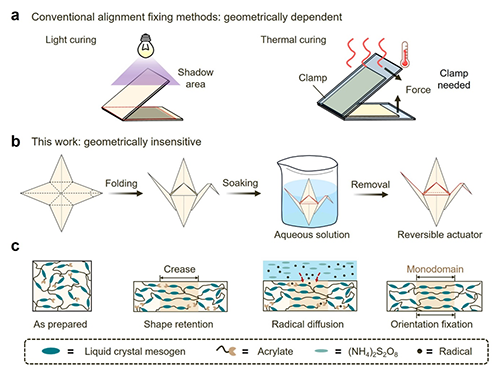
图1 通过自由基扩散实现液晶弹性体取向编程
研究团队发现,只需将液晶弹性体在室温下浸泡于含过硫酸铵(APS)的水溶液中,APS生成的硫酸根自由基便可全方位渗透到材料内部,与残留的丙烯酸基团发生化学交联,从而固定分子取向。这一过程无需加热、光照或外力固定,且材料本身的疏水性防止了水致膨胀,保证了复杂变形结构在编程过程中的稳定性。实验表明,该方法适用于3D打印、模压、浮雕甚至折纸结构的液晶弹性体,并能在几小时内完成高效取向固定。

图2 通过自由基扩散编程液晶弹性体材料的驱动性能
材料在单轴预拉伸后可实现接近110%的可逆驱动应变,并在高达140 ℃的环境下仍保持稳定性能。与动态化学键固定法相比,该方法的热稳定性明显提升。团队还优化了材料配方和浸泡条件,确定了最佳APS浓度、交联剂比例及丙烯酸基团含量,使驱动应变与编程效率达到平衡。
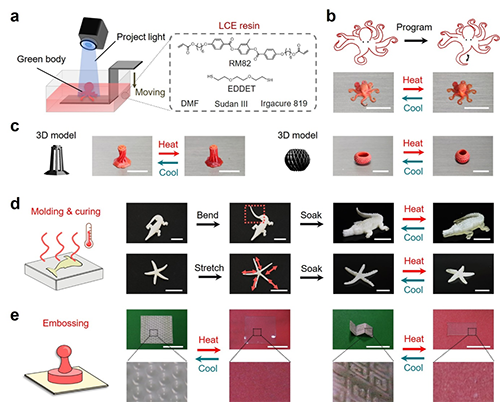
图3 三维液晶弹性体驱动器的成型制造
该方法的几何“无感知”特性,使得复杂结构的驱动设计成为可能,包括实现DLP打印出的复杂液晶弹性体模型在编程后可实现稳定可逆变形;可通过模具一次性成型并赋予驱动功能,如鳄鱼、海星造型;通过局部厚度变化实现图案在三维结构上的可逆显隐等。特别值得一提的是,该方法能在复杂折痕和局部区域自由编程,甚至实现局部3D形态间的相互转换,为多模式软体机器人设计提供了新的可能。
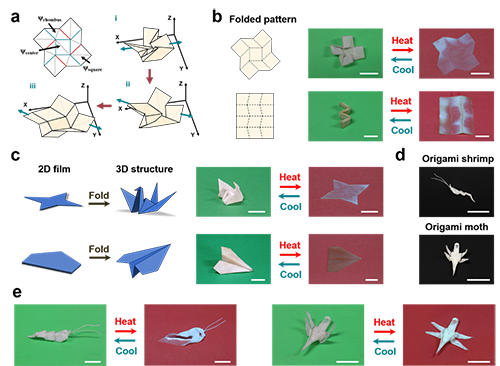
图4 折纸液晶弹性体驱动器
研究团队认为,这一“变形即走”策略适用于大多数丙烯酸基液晶弹性体体系,可推广至个性化定制与批量化生产,尤其适合软体机器人、可穿戴柔性器件、智能传感以及空间可展开结构等领域。该成果不仅在技术上解决了长期困扰LCE驱动器设计的几何限制问题,也在理念上展示了软体机器人“从形到能”的新路径,为智能材料科学注入了新的活力。
为了推动此项技术的应用,团队与杭州之江有机硅化工有限公司/杭州之江新材料有限公司的邢浩博士开展了深入合作,围绕着新型弹性体的工艺优化和性能提升展开了研究。研究团队感谢杭州之江有机硅化工有限公司在设备、场景与技术交流方面的支持。团队表示,未来将继续探索弹性体技术应用潜力,结合材料体系优化与结构设计,推动该技术向工程化与实用化发展。
原文链接:https://doi.org/10.1038/s41467-025-62883-8
- 南开大学刘遵峰合作团队 AM:破解液晶弹性体纤维力学-驱动-阻尼三元矛盾→揭示全新连续液晶相变过程 2026-07-10
- 斯坦福赵芮可教授团队 Nat. Commun.: 具有时空可编程表面褶皱的光热驱动液晶弹性体多功能平台用于信息编码与物体操控 2026-07-01
- 天津大学封伟教授团队 Angew: 胆甾液晶弹性体变色光子材料前沿进展 2026-06-22
- 北航罗斯达教授 Sci. Adv.:激光编程软执行器-解锁仿生软体机器人变形定制新方法 2026-07-04
- UCLA贺曦敏团队 Sci. Adv. 封面:球形无系留自维持滚动机器人 2026-05-01
- 哈工大(深圳)朱时裴教授课题组诚招硕士、博士、博士后 - 材料、化学、物理、机械、生物工程 2025-09-17
- 合工大胡颖、张晨初/赵玉顺 AFM:仿生“变色蝴蝶”驱动器实现形变、变色与红外发射率调控协同响应 2026-06-07
