可穿戴设备的新纪元-柔性电子皮肤
2016-07-05 来源:知产力
电子皮肤,又名新型可穿戴柔性仿生触觉传感器。它像皮肤一样既软又薄,是贴在“皮肤”上的电子设备,因而习惯性的被称为电子皮肤,其结构简单,可被加工成各种形状,像衣服一样附着在人体皮肤或者是机器人的身体表面,使其具备感觉和触觉,即与人体皮肤一样感知不同外界压力的功能。
 可以感知外界的机器人一般出现在科幻电影中,而如今科技的进步,使得我们完全可以赋予机器人可感知外界的电子皮肤。电影中的机器人能够通过手上的电子皮肤感知外界世界,甚至能够感受到微弱的如昆虫力一般的外部压力,从而获得和人类一样的触觉,如下图演示。该动态图展现了电影中对机器人手部皮肤的一种憧憬,这种皮肤具有柔软并且能敏感的感知外部微弱压力的特质,使得机器人能够准确的抓取小昆虫。
可以感知外界的机器人一般出现在科幻电影中,而如今科技的进步,使得我们完全可以赋予机器人可感知外界的电子皮肤。电影中的机器人能够通过手上的电子皮肤感知外界世界,甚至能够感受到微弱的如昆虫力一般的外部压力,从而获得和人类一样的触觉,如下图演示。该动态图展现了电影中对机器人手部皮肤的一种憧憬,这种皮肤具有柔软并且能敏感的感知外部微弱压力的特质,使得机器人能够准确的抓取小昆虫。
2.电子皮肤的技术构成
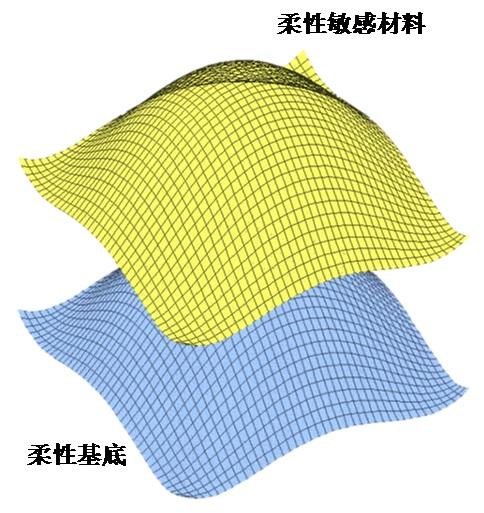
电子皮肤在技术构成上主要涉及材料、结构两部分,如下图所示,敏感材料以不同的结构掺杂被于柔性基底材料中,进而形成电子皮肤。
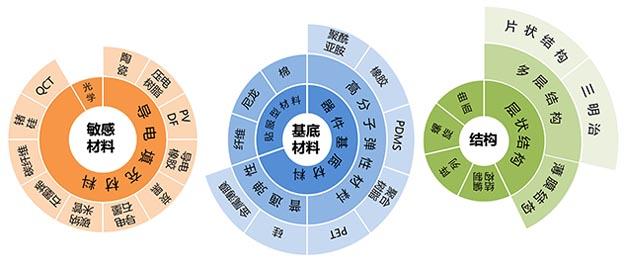
 对电子皮肤所涉及到的材料按照应用类型进行分解,分为敏感材料和基底材料两大类。其中敏感材料用于感知外界信号,敏感材料按照检测原理又可以进一步划分为光学填充材料和导电填充材料,基底材料按照材料性能又可以进一步划分为贴附型基底材料和器件基底材料,而器件基底材料按照材料分子的组成又进一步分为普通材料和高分子材料。
对电子皮肤所涉及到的材料按照应用类型进行分解,分为敏感材料和基底材料两大类。其中敏感材料用于感知外界信号,敏感材料按照检测原理又可以进一步划分为光学填充材料和导电填充材料,基底材料按照材料性能又可以进一步划分为贴附型基底材料和器件基底材料,而器件基底材料按照材料分子的组成又进一步分为普通材料和高分子材料。
对电子皮肤的结构按照其基本构造进行分解划分为层状结构、曲面结构、阵列以及螺旋结构。进一步地,按照层级的多少,可以将层状结构分为多层结构和薄膜结构,而多层结构中则包含仅有三层的三明治结构以及其他的多层片状结构。
电子皮肤技术构成分解图
 3.电子皮肤的广泛引用
3.电子皮肤的广泛引用
下图展示了现有技术中存在的电子皮肤,其既能够像薄如蝉翼的薄膜一样贴附在人体皮肤表面,也能够附着于可弯曲的基底材料上实现相关参数检测。
 应用于智能衣服:将电子皮肤贴付于衣服表面或是编织于衣服中实现生理参数的检测给传统衣服添加了智能的功能。穿着智能服装能够采集多种身体信号以及外部环境信号。通过客观准确的身体信号解析身体的生理语言,结合实时的环境信息给出如健康、运动、是否便于出行等生活需要的参数建议,使得人们的生活更加科学、更为便捷。
应用于智能衣服:将电子皮肤贴付于衣服表面或是编织于衣服中实现生理参数的检测给传统衣服添加了智能的功能。穿着智能服装能够采集多种身体信号以及外部环境信号。通过客观准确的身体信号解析身体的生理语言,结合实时的环境信息给出如健康、运动、是否便于出行等生活需要的参数建议,使得人们的生活更加科学、更为便捷。

应用于运动鞋垫和矫正护膝:运动鞋垫和矫正护膝是当今比较前沿的概念性可穿戴产品,通过敏感的电子皮肤感测足底和膝关节的运动参数,从而给以科学运动的建议。
传统的矫正类护具通常由医生帮助患者固定,定期观测调整位置和形状。采用电子皮肤的矫正类护具能够实时检测人体敏感部位的参数,通过相关参数的检测帮助更为客观的矫正,起到更好的矫正效果。对于矫正类护具用到的电子皮肤,由于其通常直接接触人体需矫正处,需要提供更为舒适的检测环境。
应用于机器人手臂、手指皮肤:机器人手臂皮肤用于感知外界的细微敏感压力,从而传递触摸等微小力的感知,对于精准度的要求极高。
 机器人手指皮肤,顾名思义是手指部位的敏感皮肤。由于其感知部位的特殊性——用于感知多个方向的抓取力量,因而对于多维力的感测要求是极高的,以便于灵活准确的抓取物件。
机器人手指皮肤,顾名思义是手指部位的敏感皮肤。由于其感知部位的特殊性——用于感知多个方向的抓取力量,因而对于多维力的感测要求是极高的,以便于灵活准确的抓取物件。
4.电子皮肤技术的生命周期
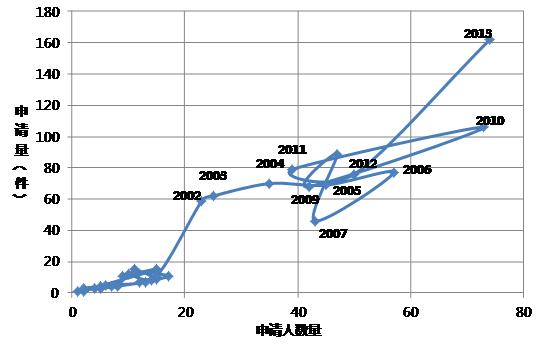
电子皮肤技术的技术生命周期可以化分为4个阶段。
(1)萌芽期(1980-1989年):这一时期,专利起源于美国、日本、德国等材料技术领先的国家,材料技术的领先直接带动了电子皮肤的发展。但全球范围内申请人和专利申请量都处于个位数的量级。专利申请处于分散式的初探摸索阶段。
(2)第一发展期(1990-2006年):在1990年前后,专利申请数量迅速井喷,但是申请人数量增长缓慢。虽然这一时期的技术处于瓶颈期,没有新的突破,但是这一时期各大领跑申请人开始重视专利布局,纷纷就同一主题的发明创造向多个联盟国递交专利申请,为日后的市场链打下基础。
(3)调整期(2006-2011年): 2007年至2011年期间申请人数量和专利申请数量处于盘旋式发展阶段。其中,在2007年和2008年,由于智能概念的新定义以及智能设备的普及化,人们对可穿戴设备以及智能机器人有了更高的需求,智能服装以及智能机器人市场的背后渐渐浮现出商机。尽管在该期间专利的申请量有所下降,但是研发的脚步并没有停留,各个公司企业厚积薄发,纷纷在2010年提出自己的发明创造,因此在2010年申请人和申请量达到了最高峰值。随后,市场化的瓶颈限制了申请人和申请量的进一步突破。
(4) 第二发展期(2011年以后):2011年至今,申请人的数量和申请量都是直线上升,电子皮肤迎来了再一次的迅猛发展,达到井喷状态,也说明电子皮肤技术克服了瓶颈,开始有所突破。随着碳纳米管、石墨烯等能够用于电子皮肤的新材料不断涌现,国内外的研究团队都将研发重点重新放在了电子皮肤上。并且,在该时期,无论是国内还是国外都出现了一些个人申请,由于电子皮肤领域是一个新兴产业,一些电子发烧友会对该领域产生浓厚的兴趣,投入到研发行列。
5.电子皮肤领域的专利战争,硝烟待起
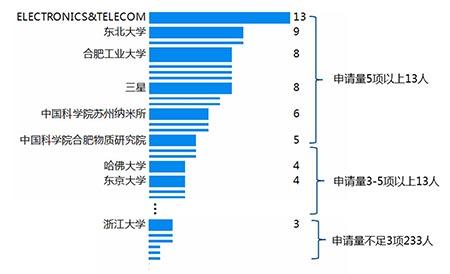
电子皮肤领域的申请人排名情况。在电子皮肤领域,申请人数量较多,但每个申请人的申请量并不多,呈现出申请人较分散的情况。这一现状与电子皮肤领域的强烈关注度形成鲜明对比,大量申请人涌入这一领域但却没有形成有效的专利垄断。下图展现了分散的申请人排名以及涉及的专利情况。
6.电子皮肤最新报道——海绵状触觉传感器模拟人类皮肤
2016年4月25日麦姆斯咨询报道,韩国汉阳大学电子工程学院的研究人员,在英国皇家化学学会杂志上发表了一篇文章,题为《一种应用石墨烯海绵状导电复合材料的触觉传感器》,介绍了一款能够感知压力和振动的柔性触觉传感器。该柔性触觉传感器制作成本低廉,制作方法为:将一块聚亚胺酯海绵在石墨烯纳米薄片悬浮液中进行表面浸涂,然后用两片表面沉积薄膜电极的聚奈酯(PEN)保护膜夹覆,形成三明治结构,由此制得该柔性触觉传感器。
下图为扫描电子显微镜成像图,图(a)为未浸涂的聚亚胺酯海绵骨架,图(b)为石墨烯浸涂聚亚胺酯海绵复合材料。
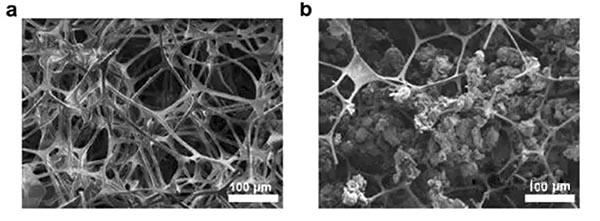 当导电石墨烯“海绵”受力压缩时,石墨烯薄片之间的距离缩短,压阻传感器电导率随之渐进变化。该传感器的尺寸为15 x 15 x 15mm,垂直方向压力感测的可靠范围为几个帕斯卡(相当于重量为0.11g的物体放在表面时的压力)到20kPa(和人类皮肤压力感知范围100~100000Pa相近)。该柔性传感器也进行了频率测试,在频率达到50Hz时信噪比超过20dB,与人类对纹理信息的振动敏感性(最高400Hz)大致相当。另外,对传感器探测物体表面粗糙度的实验中,对传感器表面应用了聚对苯二甲酸乙二醇酯(PET)脊状结构(一个80 x 200μm的凸状物作为一个探针),精确的模仿人类皮肤表面的褶皱,估算该传感器对局部施加压力的空间分辨率为80μm。
当导电石墨烯“海绵”受力压缩时,石墨烯薄片之间的距离缩短,压阻传感器电导率随之渐进变化。该传感器的尺寸为15 x 15 x 15mm,垂直方向压力感测的可靠范围为几个帕斯卡(相当于重量为0.11g的物体放在表面时的压力)到20kPa(和人类皮肤压力感知范围100~100000Pa相近)。该柔性传感器也进行了频率测试,在频率达到50Hz时信噪比超过20dB,与人类对纹理信息的振动敏感性(最高400Hz)大致相当。另外,对传感器探测物体表面粗糙度的实验中,对传感器表面应用了聚对苯二甲酸乙二醇酯(PET)脊状结构(一个80 x 200μm的凸状物作为一个探针),精确的模仿人类皮肤表面的褶皱,估算该传感器对局部施加压力的空间分辨率为80μm。
研究人员表示:该石墨烯海绵状传感器打破了分立式加速度计和压力传感器的内在限制,突破性的将多种传感器集成在一个结构元件中,在机器人和义肢领域具有应用前景。
7.总结
从电子皮肤技术的生命周期来看,电子皮肤的专利申请量和申请人数量均呈现出迅速增长的趋势,各种概念产品层出不穷,不断有新的电子皮肤产品报道面世,预示着产品市场的广阔前景。从专利申请人分布来看,仍呈现分布比较松散的状态,目前并没有规模化的龙头企业,也没有形成有效的专利壁垒。可见,该项技术上整体处于起步阶段,其广阔的市场前景已引起了业界广泛关注,国内相关科研院所应提高知识产权保护意识。
技术创新方面,电子皮肤的新技术主要集中在新材料的选择和新结构的创新上。产品创新方面,则主要体现在机器人领域、可穿戴设备领域以及医疗检测产品上。对于该新兴技术,如何将其应用于上述领域的产品,研究其材料、结构构成进而实现柔性检测的准确性,是值得研究人员深入考虑的事情。
本文作者:专利审查协作北京中心光电部 刘婉姬
2.电子皮肤的技术构成
电子皮肤在技术构成上主要涉及材料、结构两部分,如下图所示,敏感材料以不同的结构掺杂被于柔性基底材料中,进而形成电子皮肤。
对电子皮肤的结构按照其基本构造进行分解划分为层状结构、曲面结构、阵列以及螺旋结构。进一步地,按照层级的多少,可以将层状结构分为多层结构和薄膜结构,而多层结构中则包含仅有三层的三明治结构以及其他的多层片状结构。
电子皮肤技术构成分解图
下图展示了现有技术中存在的电子皮肤,其既能够像薄如蝉翼的薄膜一样贴附在人体皮肤表面,也能够附着于可弯曲的基底材料上实现相关参数检测。
传统的矫正类护具通常由医生帮助患者固定,定期观测调整位置和形状。采用电子皮肤的矫正类护具能够实时检测人体敏感部位的参数,通过相关参数的检测帮助更为客观的矫正,起到更好的矫正效果。对于矫正类护具用到的电子皮肤,由于其通常直接接触人体需矫正处,需要提供更为舒适的检测环境。
应用于机器人手臂、手指皮肤:机器人手臂皮肤用于感知外界的细微敏感压力,从而传递触摸等微小力的感知,对于精准度的要求极高。
4.电子皮肤技术的生命周期
电子皮肤技术的技术生命周期可以化分为4个阶段。
(1)萌芽期(1980-1989年):这一时期,专利起源于美国、日本、德国等材料技术领先的国家,材料技术的领先直接带动了电子皮肤的发展。但全球范围内申请人和专利申请量都处于个位数的量级。专利申请处于分散式的初探摸索阶段。
(2)第一发展期(1990-2006年):在1990年前后,专利申请数量迅速井喷,但是申请人数量增长缓慢。虽然这一时期的技术处于瓶颈期,没有新的突破,但是这一时期各大领跑申请人开始重视专利布局,纷纷就同一主题的发明创造向多个联盟国递交专利申请,为日后的市场链打下基础。
(3)调整期(2006-2011年): 2007年至2011年期间申请人数量和专利申请数量处于盘旋式发展阶段。其中,在2007年和2008年,由于智能概念的新定义以及智能设备的普及化,人们对可穿戴设备以及智能机器人有了更高的需求,智能服装以及智能机器人市场的背后渐渐浮现出商机。尽管在该期间专利的申请量有所下降,但是研发的脚步并没有停留,各个公司企业厚积薄发,纷纷在2010年提出自己的发明创造,因此在2010年申请人和申请量达到了最高峰值。随后,市场化的瓶颈限制了申请人和申请量的进一步突破。
(4) 第二发展期(2011年以后):2011年至今,申请人的数量和申请量都是直线上升,电子皮肤迎来了再一次的迅猛发展,达到井喷状态,也说明电子皮肤技术克服了瓶颈,开始有所突破。随着碳纳米管、石墨烯等能够用于电子皮肤的新材料不断涌现,国内外的研究团队都将研发重点重新放在了电子皮肤上。并且,在该时期,无论是国内还是国外都出现了一些个人申请,由于电子皮肤领域是一个新兴产业,一些电子发烧友会对该领域产生浓厚的兴趣,投入到研发行列。
5.电子皮肤领域的专利战争,硝烟待起
电子皮肤领域的申请人排名情况。在电子皮肤领域,申请人数量较多,但每个申请人的申请量并不多,呈现出申请人较分散的情况。这一现状与电子皮肤领域的强烈关注度形成鲜明对比,大量申请人涌入这一领域但却没有形成有效的专利垄断。下图展现了分散的申请人排名以及涉及的专利情况。
电子皮肤领域申请人排名
6.电子皮肤最新报道——海绵状触觉传感器模拟人类皮肤
2016年4月25日麦姆斯咨询报道,韩国汉阳大学电子工程学院的研究人员,在英国皇家化学学会杂志上发表了一篇文章,题为《一种应用石墨烯海绵状导电复合材料的触觉传感器》,介绍了一款能够感知压力和振动的柔性触觉传感器。该柔性触觉传感器制作成本低廉,制作方法为:将一块聚亚胺酯海绵在石墨烯纳米薄片悬浮液中进行表面浸涂,然后用两片表面沉积薄膜电极的聚奈酯(PEN)保护膜夹覆,形成三明治结构,由此制得该柔性触觉传感器。
下图为扫描电子显微镜成像图,图(a)为未浸涂的聚亚胺酯海绵骨架,图(b)为石墨烯浸涂聚亚胺酯海绵复合材料。
研究人员表示:该石墨烯海绵状传感器打破了分立式加速度计和压力传感器的内在限制,突破性的将多种传感器集成在一个结构元件中,在机器人和义肢领域具有应用前景。
7.总结
从电子皮肤技术的生命周期来看,电子皮肤的专利申请量和申请人数量均呈现出迅速增长的趋势,各种概念产品层出不穷,不断有新的电子皮肤产品报道面世,预示着产品市场的广阔前景。从专利申请人分布来看,仍呈现分布比较松散的状态,目前并没有规模化的龙头企业,也没有形成有效的专利壁垒。可见,该项技术上整体处于起步阶段,其广阔的市场前景已引起了业界广泛关注,国内相关科研院所应提高知识产权保护意识。
技术创新方面,电子皮肤的新技术主要集中在新材料的选择和新结构的创新上。产品创新方面,则主要体现在机器人领域、可穿戴设备领域以及医疗检测产品上。对于该新兴技术,如何将其应用于上述领域的产品,研究其材料、结构构成进而实现柔性检测的准确性,是值得研究人员深入考虑的事情。
本文作者:专利审查协作北京中心光电部 刘婉姬
版权与免责声明:本网页的内容由中国聚合物网收集互联网上发布的信息整理获得。目的在于传递信息及分享,并不意味着赞同其观点或证实其真实性,也不构成其他建议。仅提供交流平台,不为其版权负责。如涉及侵权,请联系我们及时修改或删除。邮箱:info@polymer.cn。未经本网同意不得全文转载、摘编或利用其它方式使用上述作品。
(责任编辑:xu)
相关新闻
- 江南大学刘天西、董建成/韩国科学技术院Steve Park连发两篇 Adv. Mater.:在电子皮肤领域取得系列研究成果 2026-06-26
- 苏大张晓宏教授团队招聘博士后 - 人形机器人电子皮肤与多模态触觉感知方向 2026-06-17
- 浙江大学IBE团队蓝玲怡研究员 Nat. Commun.:仿生凝胶基电子皮肤压力传感器实现抓取过程中水果硬度的精准感知 2026-05-31
- 厦门大学廖新勤团队 Nature子刊: 柔性电子围巾读懂无声语言 2026-06-06
- 中山大学付俊教授团队 AFM 综述:超薄可穿戴柔性电子器件及其智能健康监测应用研究进展 2026-05-30
- 苏州大学张晓宏教授课题组招聘柔性电子器件方向博士后 2026-05-06
