皮肤在人们与自然界互动的过程中担任着至关重要角色。通过皮肤的感知功能,人们可以毫不费力地区分感触到的微风、织物、软硬物体表面。所以,对于皮肤组织受损以及截肢人员,其皮肤感知功能的修复将大大提高他们的生活质量。这项科学和工程上的极限挑战极大促进了新材料、新设备和新制造技术的发展。人工电子皮肤作为人体皮肤的一大替代材料,近些年深受材料科学家们的青睐,各项研究成果不断见诸报道。
日前,斯坦福大学著名华裔科学家鲍哲楠等人在Nature Materials上撰文,综述了人工电子皮肤可能的备选材料、感知生物信号能力等方面的设计要素等内容。
人工电子皮肤材料能够模拟人体皮肤的功能,科学家们正在研究如何让其更好地运用于机械义肢。现有的机械义肢已经可以模拟手臂的许多机械性能,当给其添加皮肤感知功能后,就可以给截肢患者的生活带来切实的帮助。这样一来,人工义肢就可以通过人工电子皮肤的感知回馈带给患者一种义肢即真肢的感觉,且其在减少患肢疼痛和义肢认知紧张方面,优势显著。值得一提的是,通过电子元件制备的具有人类皮肤功能的电子皮肤,可以广泛运用于义肢和药物研制。人们对人工皮肤的研究兴起,也激发了模拟包括机械耐用性和拉伸性、生物降解性以及具备多重感官等功能的皮肤材料的研究和创新。新材料的研发制备使得机械相容性、复杂皮肤功能化并能将皮肤感知的信号传导给身体的皮肤材料的出现成为可能。
Part 1:来自人体的生物启发
要想让真实皮肤的感知功能在人工电子皮肤上得到再现,就必须对真实皮肤的感官性能和传感机制进行研究和模拟。人体皮肤感知受体分为:疼痛感受器,冷热感受器和四种机械刺激感受器。图1表示人体皮肤对外界刺激的感知传导机制,位于皮下的感知受体感受到外界刺激后,将其转化为生物电信号,通过神经组织传递给大脑。大脑对接受的电信号加以处理,从而对外界刺激进行感知。

图1:皮肤受体和传导过程:a. 人类皮肤中冷感受器所产生的动作电位。b. 皮肤机械感受器位置原理图。c. 机械感受器的类型、功能、相应时间及在手掌中的分布密度。RF,接受域大小;SA-Ⅰ和SA-Ⅱ,慢适应受体;FA-Ⅰ和FA-Ⅱ,快适应受体。d. 感官刺激从外界(起始点)到大脑中人工受体(终止点)的传导过程。信号采集、模拟动作电位的电信号的编码、传动装置和神经接口都是为假肢提供感知功能所必不可少的组成部分。
Part 2:机械性能模拟
人体皮肤对机械刺激和运动有一定的感知能力,人工电子皮肤模拟人体皮肤的这项功能,使义肢能够拥有与真实皮肤相似的机械感知和耐用程度。在新一代人工电子皮肤中,柔性电子材料取代刚性元件,降低弹性模量的同时提高了人工皮肤的拉伸性,从而提高了皮肤的机械运动性能并降低了成本造价。人工皮肤材料实现其拉伸性的三种方法:(1)柔性元件的屈曲;(2)不连续组件的运用;(3)本征柔性材料的运用
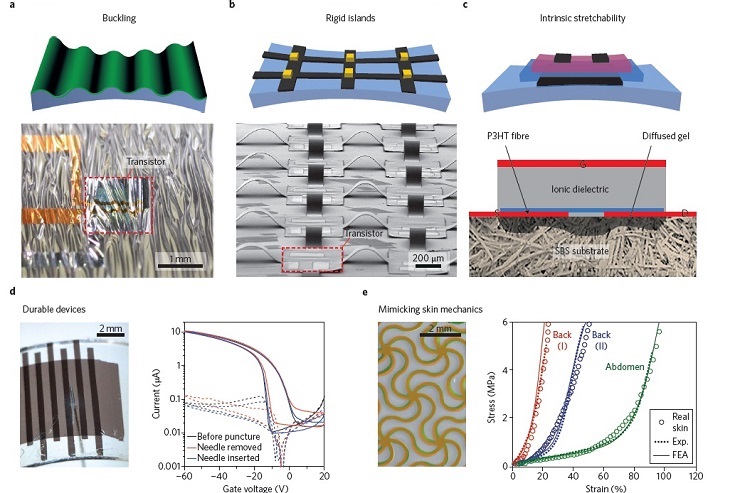
图2:电子元件不同部位的拉伸性:a. 弯曲应力作用下的基质层。b. 像素层中链接刚性元件的中间体的拉伸性。c. 运用元件而使材料具有弹性的材料层。d. 左图:具有高耐用性和拉伸性的碳纳米晶体管,能在冲击和穿刺作用下维持其功能。右图:细针刺入晶体管空腔前后的传递曲线。虚线代表门电流,通常等于泄漏电流。e. 通过一定的设计(左图)来模拟人体皮肤功能(右图)。真实皮肤背腹两面(空心圆)机械性能与仿生材料实验数据(Exp.)以及变形力学的有限元分析(FEA)。
Part 3:实现皮肤感知功能
人体皮肤能对温度、压力、张力和振动等外界刺激进行感知并作出反应。皮肤感受器将这些外界刺激通过一定机制转化成电信号,人工皮肤能够模拟这一过程,将相似的电信号输出给仿生受体。对于仿生受体来说,灵敏的传感器和信号传输电路是至关重要的两个部分,它们起到对仿生信息进行编码的作用。
Part 4:仿生信号的编码方式
对于安全有效的外界刺激,神经组织会相应生成一种脉冲波形来模拟它,其振幅、频率和持续时间是最重要的三个参数。接下来,电子输出信号将被编码为便于神经系统理解和传输的生物信号。大面积的电子皮肤下将安置高密度传感器阵列来获取人体感官。所以,灵活的读出矩阵也为数据的高效采集和传输提供了必要条件。
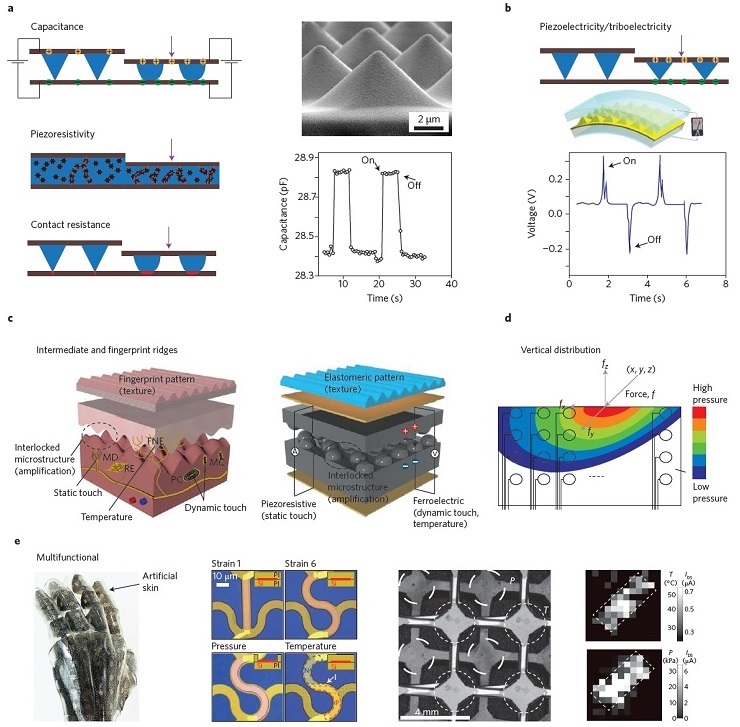
图3:皮肤刺激传导元件:a. 左图:测量静电压的电容(顶图),大块电容电阻(中间图)以及瞬变电阻(底图)。紫箭头代表外界压力;黑星图标代表导电粒子;中间图的红色虚线代表渗流通道。底图红色加强部分代表接触面积。右图:带有金字塔形电解质(顶图)的电容传感器在恒定压力下有恒定的反馈值(底图)。b. 摩擦静电和压电元件在外力作用下产生电压(顶图)。压电元件(中间图)对外界刺激做出的动态反馈(底图),可用以实现FA-Ⅰ和FA-Ⅱ的功能。c. 中间脊可以用以集中外力,指纹可以用来辨别纹理。FNE,游离神经末梢;MD,梅克尔盘;RE,罗菲尼小体;PC,帕西尼氏小体;MC,触觉小体。d. 压力传感器的四个垂直层可以用来像仿生皮肤一样感知复杂的压力分布。e. 左图:多功能电子皮肤上所含测量张力、压力(P)、温度(T)、湿度的电子元件。N,P和I分别代表硅带上的N型、P型和本征半导体区域。右图:测量压力和温度的多层有机有源矩阵基质。IDS,源漏电流。
Part 5:触觉感知机制
刺激感受机制中,最重要的一步就是将自然刺激和本体感受在义肢电子皮肤上得到再现。这一点难实现之处在于人们对神经系统编码方式的了解极为有限,且制造稳定的神经信号接收界面更是难上加难。中央和周围神经系统通过电极、光极、声感应和电磁感应接收刺激。科学家们研究不同的感知机制,并期在将其运用在人工电子皮肤上。
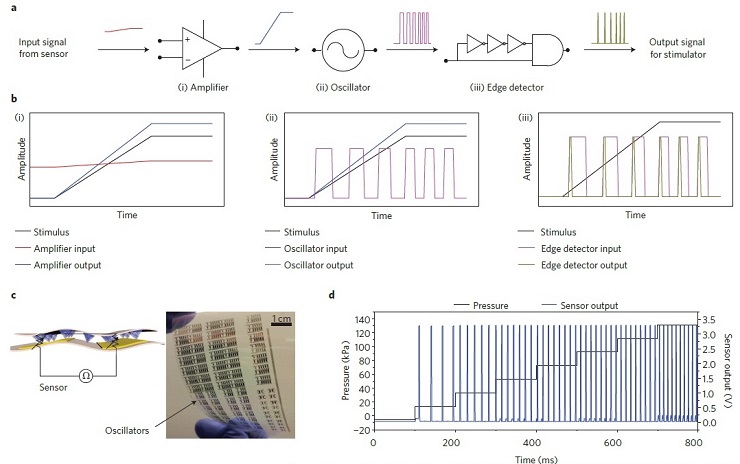
图4:用以收集和转化仿生信号的读出电子设计:a.外界信号转变成电子棘波的流程原理图,需要放大器(i)、振荡器(ii)和边界检测器(iii)。b.信号处理电路各阶段的输入输出信号值。放大器的输入信号为传感器实验信号,边界检测器的输出信号是将刺激强度转变为“动作电位”的仿生信号。c.左图:阻压传感器原理图;右图:运用在人工机械刺激感受器上的打印环形振荡器信号。d.图c表征的机械刺激感受器元件的输出电压值。
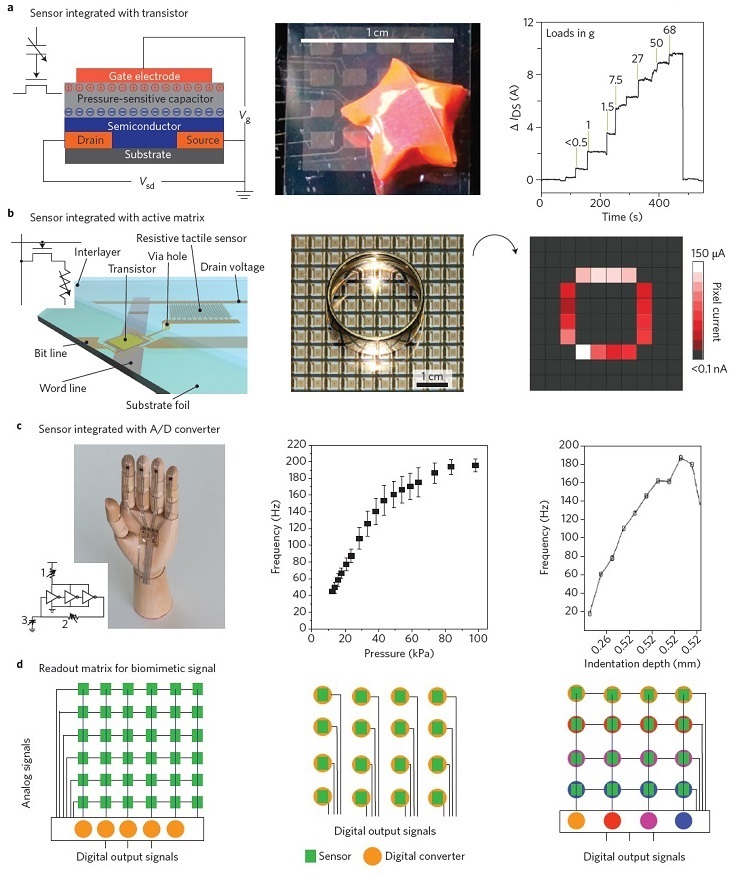
图5:信号读出和搜寻所需的传感器和电路设计。a. 与转换和发大原位信号的晶体管相连接的传感器。左图:与晶体管相连的电容传感器结构原理图。插图:与信号转换晶体管相连的电容传感器电路图。Vsd和Vg分别表示施加在源电极和漏极之间、栅电极和漏极之间的电压值。中间图:晶体管传感器基质的二维压力图。右图:压敏有机晶体管的典型性能。IDS代表源电极和漏极的现时电流。b. 与现场多路复用电路相连的传感器阵列。左图:与开关晶体管相连的电阻传感器的原理图。插图:用于多路复用的晶体管传感器的电路图。右图:用于搜寻金属环的典型触觉感知阵列。c. 与用以产生仿生信号的模数转换器相结合的传感器。左图:一端连手指尖,一端连内含模数转换器的连接器的压力传感器。插图:带有振荡器的集成化传感器原理图。1,2和3代表频率可调机制。1处改变电源电压;2处改变反馈回路电阻;3处改变反馈回路电容。中间图:传感振荡器与真实机械性刺激感受器输出值的对比。误差条是升压过程中十次测量的标准偏离值。d. 读出矩阵与传感器阵列的集成。左图:灵敏读出矩阵的原理图,该矩阵用以收集和转化传感器信号。中间图:被动读出矩阵原理图,该矩阵用以收集并转换传感器模拟信号。右图:用以收集仿生及电子信号的读出矩阵原理图。不同模数转换器将生成不同以本体感受为基础编码的输出信号。
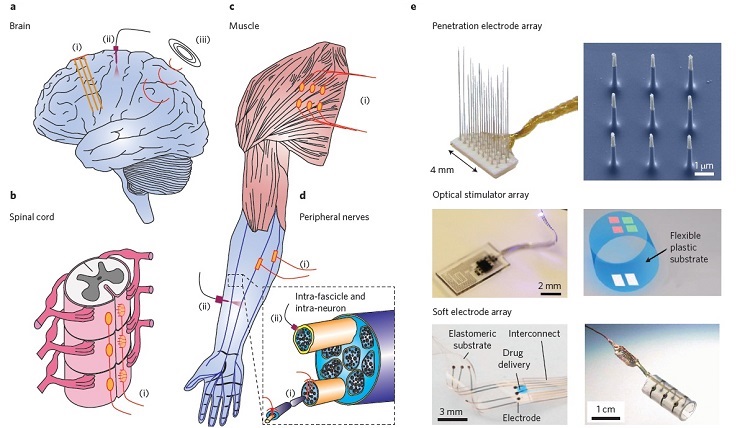
图6:将人工电子皮肤信号与神经系统相连的新兴技术与发展前景。a-d.人体中的潜在连接区域,包括大脑(a)、脊髓(b)、肌肉(c)和末梢神经(d),其连接方式包括电刺激(i),光刺激(ii)和磁刺激(iii)。插图:黑色虚线方框里的放大区域表示神经束中接受电刺激(i)和光刺激(ii)的少量或单根神经接口。e.顶图:刺激束中神经和神经内的电极排列。左图:穿透电极排列;右图:细胞内电极排列。中间图:光电诱导特异性活动的发光二极管阵列。左图:可伸缩的发光二极管;右图:多色彩的发光二极管阵列。底图:提供长期稳定生电接口的软电子元件。左图:软多功能电极阵列;右图:卡夫电路。
part6: 展望
内含多传感器的人工仿生电子皮肤将能够更便捷地处理多种输入信号,并在未来的先进机器人中得到广泛应用。同时,仿生传感器和光流分析传感器将运用于低能耗的触觉传感器系统中。人工电子皮肤将为截肢和皮肤受损患者带来福音,同时为生物医用材料界带来可喜的进步。
- 杭师大黄又举教授团队 ACS Sensors:耦合高分子凝胶人工皮肤与超晶格膜的可穿戴SERS芯片 → 实现汗液中抑郁症标志物无创检测 2026-03-27
- 张跃院士/廖新勤/陈忠等 AFM:可变机器人皮肤 2024-10-16
- 长春工大吕雪团队 Macromolecules:高韧性石墨烯基水凝胶在柔性传感器中的应用 2023-08-25
- 华裔女科学家入选《自然》杂志2015年度十大人物 2015-12-18
