自然界中的生物具有优异的湿态粘附表面,可用于固定身体和捕食猎物,探究其独特的粘附机理,不但可以为构筑仿生湿态粘附表面提供理论指导,而且能够推进其在智能机器人、可穿戴器件和生物医疗等热门领域的应用。
近日,中国科学院理化技术研究所王树涛研究员团队在Advanced Functional Materials上发表了题为“Bioinspired Multiscale Wet Adhesive Surfaces: Structures and Controlled Adhesion”的综述(DOI:10.1002/adfm.201905287),对具有多尺度微纳结构的湿态粘附表面,从生物到仿生制备进行了系统的总结,为进一步设计与构筑具有特定粘附功能的仿生湿态粘附表面提供指导。
仿生湿态粘附表面在智能机器人、可穿戴器件和生物医疗等领域具有广泛的应用前景(图1)。而自然界中的许多生物为了适应复杂的生活环境,进化出了具有独特功能的生物湿态粘附表面(图2)。探究生物粘附机理,可以为设计具有优异湿态粘附性能的人造表面提供指导,并推动其在不同领域的应用。该文从表面微纳结构的角度对生物和人造湿态粘附表面进行了系统的总结。首先,介绍了典型生物湿态粘附表面的研究进展。接着讨论了自然生物粘附的基本模型和常用的测试仪器,进而强调了受生物启发设计的人造湿态粘附表面(图3)。然后简要介绍了构筑粘附表面的典型方法。最后,对开发具有可控粘附的仿生湿态粘附表面存在的挑战和机遇进行了展望。

图1. 仿生湿态粘附表面在智能机器人、可穿戴器件和生物医疗等领域的应用。

图2. 自然界中具有独特湿态粘附表面的典型生物及其表面多尺度微纳结构。
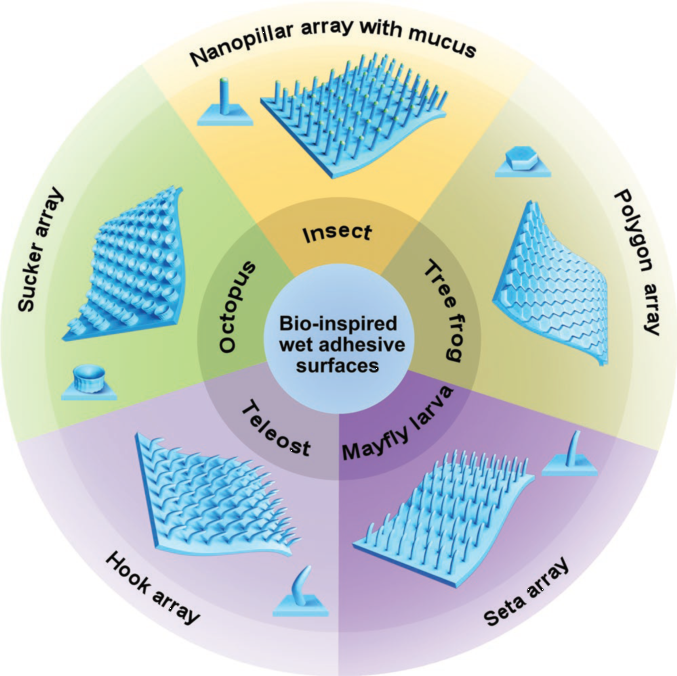
图3. 受生物启发,设计具有独特微纳结构的仿生湿态粘附表面。
该论文的第一作者为中国科学院理化技术研究所博士生陈玉鹏,孟靖昕副研究员为共同一作,通讯作者为王树涛研究员,论文得到国家自然科学基金委(21425314、21875269),国家杰出人才专项支持计划和中国科学院青年创新促进会(2017036)的资助。
论文链接https://onlinelibrary.wiley.com/doi/full/10.1002/adfm.201905287?af=R
- 中国科大龚兴龙教授课题组《Sci. Adv.》:仿生石蚕蛾幼虫巢穴 - 打造高安全高性能锂金属电池的“刚柔并济”电解质 2026-07-10
- 北航罗斯达教授 Sci. Adv.:激光编程软执行器-解锁仿生软体机器人变形定制新方法 2026-07-04
- 陕科大强涛涛、任龙芳教授团队 AFM:具有应变传感和溶剂触发报警的双模态仿生自修复聚氨酯基离子凝胶传感器 2026-06-22
- 北京化工大学蔡晴/喻盈捷 AFM:三重生物粘附性微球赋能金属离子工程化外泌体疗法,实现血管化骨再生 2026-02-18
- 南京林业大学黄超伯、熊燃华教授团队 AHM:实现伤口无缝合密封的快速止血和高韧性的生物粘附急救贴片 2024-11-15
- 江西科技师范大学卢宝阳/徐景坤 Small:3D打印高性能导电聚合物水凝胶生物粘附界面 2023-12-13
