在科学研究、工业生产和日常生活中,经常需要使用抓手来抓取、操纵和组装物体。物体的抓取和操纵是机械系统的一项基本却极具挑战的任务,因为这些物体的尺寸范围广(横跨宏观尺度到微纳米尺度),形状各异,数量规模不一,有时甚至有一些特殊要求(如在转印应用中,拾取时要求一次性抓取大量元件,印刷时却要求选择性地释放部分元件),因此很难使用一种通用方法来实现。
浙江大学宋吉舟教授课题组基于形状记忆聚合物,提出了一种适用于多尺度(1μm~1m)、任意形状物体的通用抓手。该抓手为简单的形状记忆聚合物块体,可以非常方便地进行缩放,以处理不同尺寸的物体(图1)。
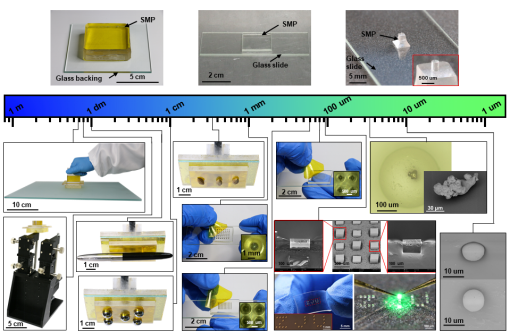
图1:不同尺度的形状记忆聚合物抓手
该设计利用形状记忆聚合物的模量智能调控效应,临时形状保持效应和永久形状记忆效应来完成物体的抓取和释放(图2)。抓取时,先在外部刺激作用(如光、热)下,让形状记忆聚合物转变到低模量的柔软状态,在该状态下将物体或者物体表面的结构嵌入形状记忆聚合物中;之后去掉外部刺激,让形状记忆聚合物回到高模量状态,保持该变形的临时形状,将物体锁住,从而把物体抓取起来。将物体转移到目的地之后,再次施加外部刺激,则形状记忆聚合物恢复初始形状,将物体“吐出”从而释放。
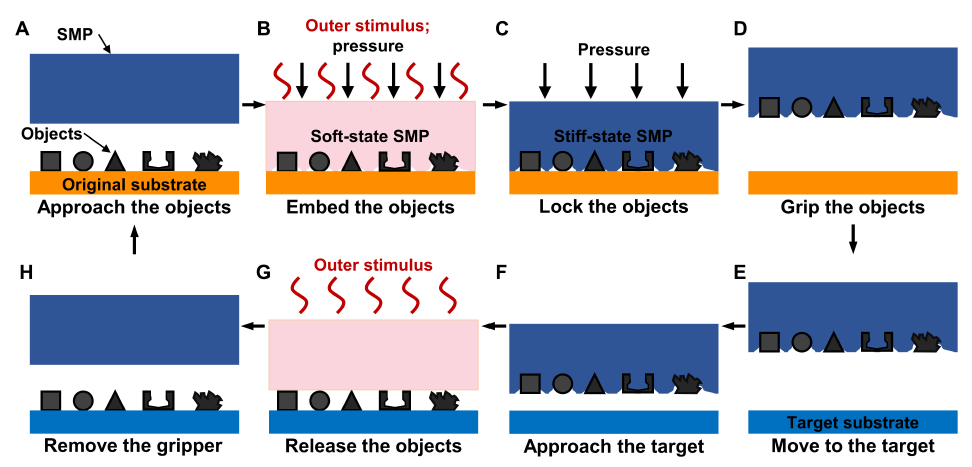
图2 通用形状记忆聚合物抓手抓取和释放物体的流程示意图
该抓手能在各种典型的三维结构物体,如球体、方块、管状物体、螺栓、螺母、枣核、钥匙串等上产生巨大的抓取力(图3)。同时,该抓手还适用于平面形状的物体。在光滑玻璃(表面粗糙度Ra = 0.019 um)上的粘附强度可达113.9 kPa,在粗糙的磨砂玻璃 (Ra = 2.2 um)上粘附强度也强至81.7 kPa,和壁虎粘附的典型值100 kPa可比(图3)。
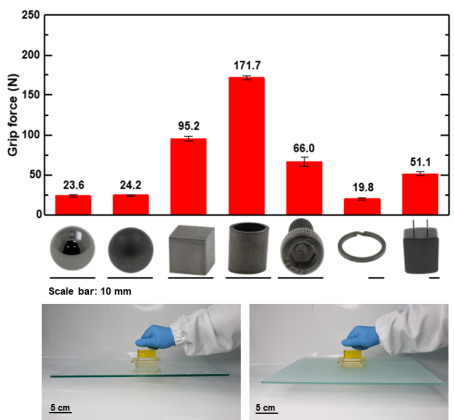
图3 通用形状记忆聚合物抓手对典型宏观物体的抓取能力
当物体尺寸小到微观尺度(100 um左右或者更小),物体受到的表面力,特别是与抓手的粘附作用强,会给物体的释放带来挑战。在该设计中,抓取通过把物体或者其表面结构锁在抓手中实现,不依赖抓手的粘附力,所以当粘附力给物体释放带来挑战时,就可以使用表面化学处理或者增加表面粗糙度的方法来减弱粘附来实现物体释放。即使是对于75 um大小的不规则铁颗粒或者是直径10 um的二氧化硅球,物体也能顺利从抓手上释放(图4)。
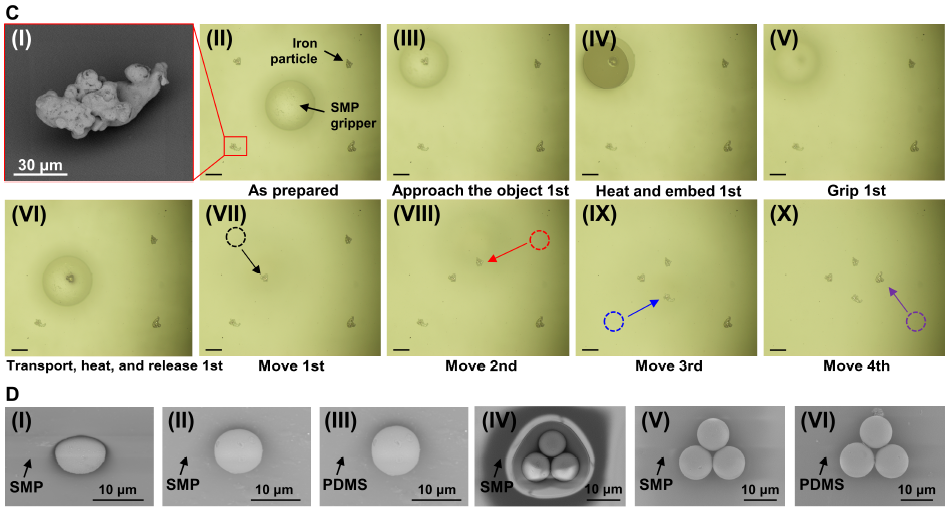
图4 使用通用形状记忆聚合物抓手操纵75 um 的不规则铁颗粒和10 um 直径的二氧化硅球
该工作创新性地提出了一种适用于多尺度,任意形状的物体抓取操纵的解决方案,其结构简单,适应性强,能有效地解决机械抓手面临的挑战,同时不依赖粘附力的抓取方式为转印技术也提供了一种新思路。这一成果近期以“Universal SMP Gripper with Massive and Selective Capabilities for Multi-scaled, Arbitrarily Shaped Objects”为题发表在Science Advances 上。文章共同第一作者为浙江大学硕士生令狐昌鸿和博士生张顺,通讯作者为浙江大学宋吉舟教授。该项目得到了国家973计划、国家自然科学基金和中央高校基本科研业务费专项资金等的支持。
该论文作者为:Changhong Linghu, Shun Zhang, Chengjun Wang, Kaixin Yu, Chenglong Li, Yinjia Zeng, Haodong Zhu, Xiaohui Jin, Zhenyu You, and Jizhou Song
- 哈工大刘宇艳教授/张东杰副教授团队 AFM:基于相分离双网络聚合物实现形状恢复起始温度的可编程调控 2026-01-12
- UCLA 金丽华教授团队 AFM:通过非平衡过程实现形状记忆聚合物可编程多模态形状演化 2025-12-23
- 东北农大张海洋团队 Small:受章鱼启发的刚度可调的智能粘附剂 - 用于空气及水下不平整表面的粘附 2025-09-02
- 四川大学张传芳教授团队 AFM:高灵敏压力传感器助力自适应机器抓手 2025-12-11
- 北卡州立大学尹杰、黄鹤团队 Nat. Commun.:更柔、更强、更精准多功能软机器手 2023-08-04
- 《Nat. Comput. Sci.》封面:“拿捏得稳稳的” 2022-10-26
