为了解决上述问题,中科院苏州纳米所李清文团队提出了一种高捻度贯穿的碳纳米管(CNT)纤维来提高电化学仿生肌肉纤维的驱动量和响应速率。
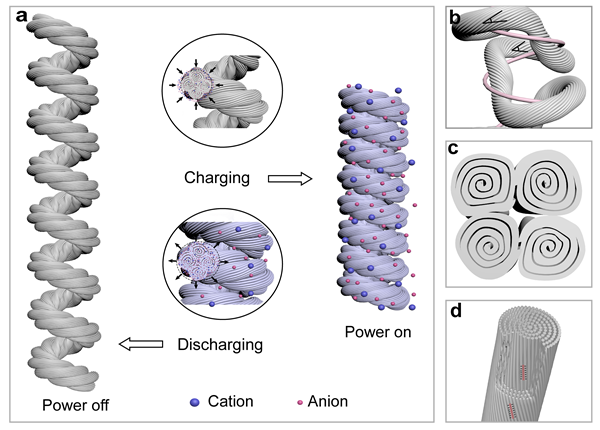
图 1. 电化学驱动高捻贯穿人工肌肉纱线的驱动机理示意图
与先前报道的螺旋CNT纱线肌肉不同(从表面到中心,其捻角逐渐减小为零),即使在肌肉纱线中心附近,组成纱线的CNT纤维仍保持高捻度(图1b),这确保纱线整体均可产生有效的驱动。此外,在高捻度的纱线肌肉中实现了多级结构,多级孔道结构促进了离子的嵌入和脱出(图1a,c,d)。两者的协同作用,共同提高电化学驱动纱线肌肉的驱动性能。
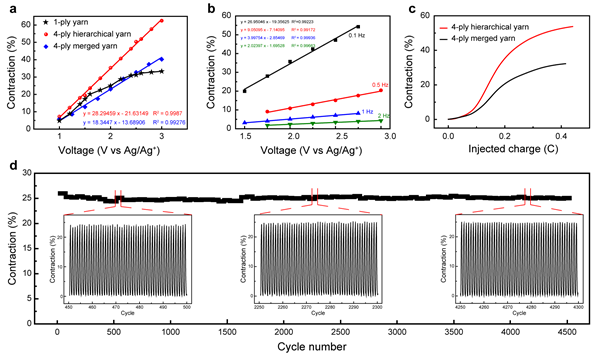
图 2. a. 人工肌肉纱线的驱动量与电压之间的关系;b. 4股多级纱线肌肉的驱动量与电压之间的关系;c. 人工肌肉纤维的驱动量与注入电荷之间的关系;d. 循环稳定性
当以电化学方式驱动时,纱线肌产生超大的收缩驱动(3 V驱动电压下驱动量超60%),同时在短时间内举起重物,其性能远优于文献值。两种类型的纱线肌肉的电荷注入量与拉伸收缩之间的关系(图2c)表明,在相同的注入电荷量下,四股高捻贯穿纱线肌肉产生的拉伸收缩比四股融合纱线肌肉高得多。这表明四股高捻贯穿纱线肌肉的结构可更加有效地将离子嵌入引起的体积变化转化为伸缩驱动。此外,收缩驱动量与施加电压呈线性相关(图2a,b),可通过施加电压对人工肌肉纱线进行精确和可编程控制。纱线肌肉还显示出长期稳定性,在循环4500圈后,驱动保留率仍大于97%(图2d)。
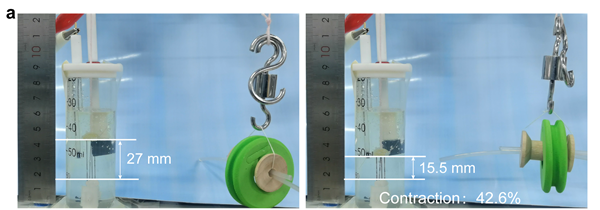
图 3. 四股集束人工肌肉纱线
该团队进一步证实了多股人工肌肉纤维集束的可能性,多股纱线集束大大增加了力的输出,可提升更重的重物,并且驱动量没有明显的下降(图3)。为了促进人工肌肉纱线的实际应用,该团队通过在碳纳米管纤维表面原位静电纺丝一层薄而多孔的聚丙烯腈纳米纤维作为隔膜及电解质层,成功制备了全固态纱线肌肉。该全固态人工肌肉可在空气中稳定的驱动,驱动量仍然达到18%。
低驱动电压、可编程收缩驱动以及大驱动量输出可大大拓宽此类人工肌肉纤维的应用范围。此外,这种具有多孔道的高捻度结构设计同样可适于制备由其他驱动方法驱动的新型纱线肌肉。
该研究成果以High-Twist-Pervaded Electrochemical Yarn Muscles with Ultralarge and Fast Contractile Actuations为题发表在Materials Horizons上。论文第一作者是中科院苏州纳米所博士生王玉莲,通讯作者为邸江涛研究员和李清文研究员。该工作得到了国家自然科学基金(21975281, 21773293,21603264)、国家重点研发计划(2016YFA0203301)等科研项目的支持。
原文链接:https://pubs.rsc.org/en/content/articlelanding/2020/MH/D0MH01352H#!divAbstract
- 浙江大学柏浩教授团队《Adv. Mater.》:白鲢鱼鳔“以柔克刚”的各向同性抗疲劳机制 2026-07-24
- 中国科大龚兴龙教授课题组《Sci. Adv.》:仿生石蚕蛾幼虫巢穴 - 打造高安全高性能锂金属电池的“刚柔并济”电解质 2026-07-10
- 北航罗斯达教授 Sci. Adv.:激光编程软执行器-解锁仿生软体机器人变形定制新方法 2026-07-04
- 东华大学张青红教授等 AFM:基于高强导电同轴MXene纤维的多响应人工肌肉 2026-06-15
- 华南理工刘伟峰、广东工大邱学青 AFM:木质素构筑动态液晶双网络 - 打造高性能光热驱动人工肌肉 2026-03-27
- 武汉纺大夏治刚/南开刘遵峰/中国药大周湘 Matter:扭转自振荡人工肌肉 2026-02-08
