南开大学刘遵峰教授 Nat. Commun.:用于微流体传感、操控的螺旋中空纤维
2022-03-19 来源:高分子科技
微流体操纵系统可精确地将少量液体输送到目标位置进行传感或分析,被输送的流体被精确地感知和控制(包括体积、温度和浓度)。然而,因为传统的传感器无法适应微流体装置中狭小的空间,所以难以获得空心纤维中少量快速流动流体的实时数据。同时,由于流体的快速流动,快速传感和驱动并不容易实现。
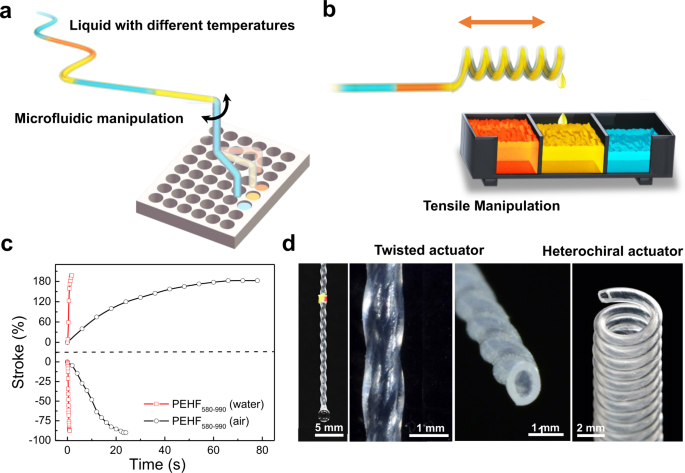
图1:用于微流体操纵的中空纤维驱动器
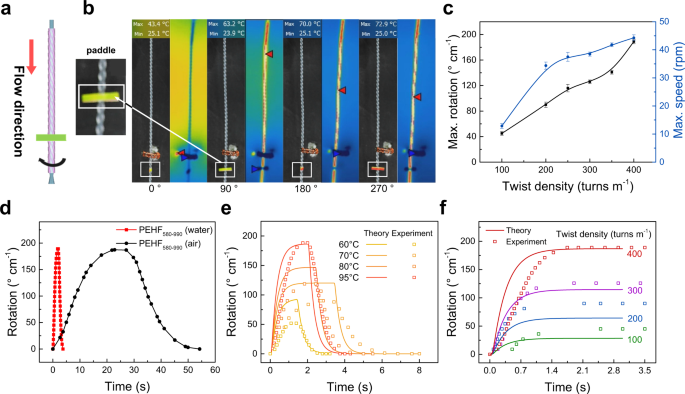
图2:扭转PEHF580-990驱动器的驱动性能

图3:流体驱动的同手性中空纤维驱动器的驱动性能

图4:PEHF580-990驱动器的微流体传感和操作
该工作是刘遵峰教授团队近期在柔性智能驱动器和传感器领域的最新进展之一。在过去的几年中,为了应对温室效应,提高制冷效率节省电能,团队还提出了一种柔性制冷新策略——“扭热制冷”,该策略的卡诺效率可以达到67%,远高于现有技术( Science, 11 Oct 2019: Vol. 366, Issue 6462, pp. 216-221)。团队为了扩宽柔性智能设备的应用场景,还研发出了可用作人工肌肉的超弹性导电纤维(Science, 2015, 349(6246): 400~404);能够耐高温和化学攻击的虾壳结构仿生驱动器(Adv. Mater.,2021,2104558);超强韧能用于高空缓降,并能在湿气下发生超收缩现象的人造蜘蛛丝(Nat. Comm., (2019) 10:5293);集体感、负重和多地形爬行等功能于一体的软体爬行机器人(Mater. Horiz., 2021,8, 1783-1794);可以感知湿度自动伸缩的智能头发人工肌肉(Mater. Horiz., 2021,8, 1538-1546);集神经传导、感知、驱动于一体的多功能人工肌肉(Mater. Horiz., 2020,7, 3305-3315)等成果,并且团队还发表了综述文章“Power of the Fiber Twist”,总结了捻度插入对纤维物理性质和化学性质的影响,及其在人工肌肉、制冷等方面的应用(Accounts of Chemical Research.2021,54,11,2624–2636)。
原文链接:https://www.nature.com/articles/s41467-022-29088-9
下载:Microfluidic manipulation by spiral hollow-fibre actuators
版权与免责声明:中国聚合物网原创文章。刊物或媒体如需转载,请联系邮箱:info@polymer.cn,并请注明出处。
(责任编辑:xu)
相关新闻
- 苏州大学汪晓巧教授、张克勤教授团队 ACS Nano:兼具辐射制冷与空气过滤双功能的螺旋纳米纤维膜 2026-04-30
- 济大王鹏/浙理工孟垂舟/河北工大刘腾 Nano Energy:墨水直写机制备的具有表面螺旋结构多层电荷动态平衡非接触摩擦纳米发电机用于人机交互 2026-04-09
- 宁波大学陈重一课题组 Macromolecules:基于可编程α-螺旋的多重形状记忆聚氨基酸材料 2026-03-10
- 合工大胡颖团队 AFM:植物叶片启发的可编程形变与湿致变色软体驱动器 2026-03-28
- 武汉大学刘兴海教授团队《Small》:仿生超韧快速响应水凝胶 2026-02-02
- 兰州大学吕少瑜 Adv. Mater.:破局“强韧矛盾” - 利用可调晶域实现水凝胶磷光寿命和韧性协同增强 2025-10-16
- 华南理工大学刘伟峰《ACS Sustain. Chem. Eng.》:具有类肌肉取向结构的生物质增强增韧导电水凝胶 2022-10-05
