软体机器人兼具卓越的变形能力和优越的界面适应性,在近些年引起了广泛关注。然而,常用软材料(如水凝胶、弹性体)表现出有限的光学、电学和热性能,严重限制了软体机器人的多功能集成(如刺激响应、环境感知、信息传递),导致其难以执行复杂的类人任务。
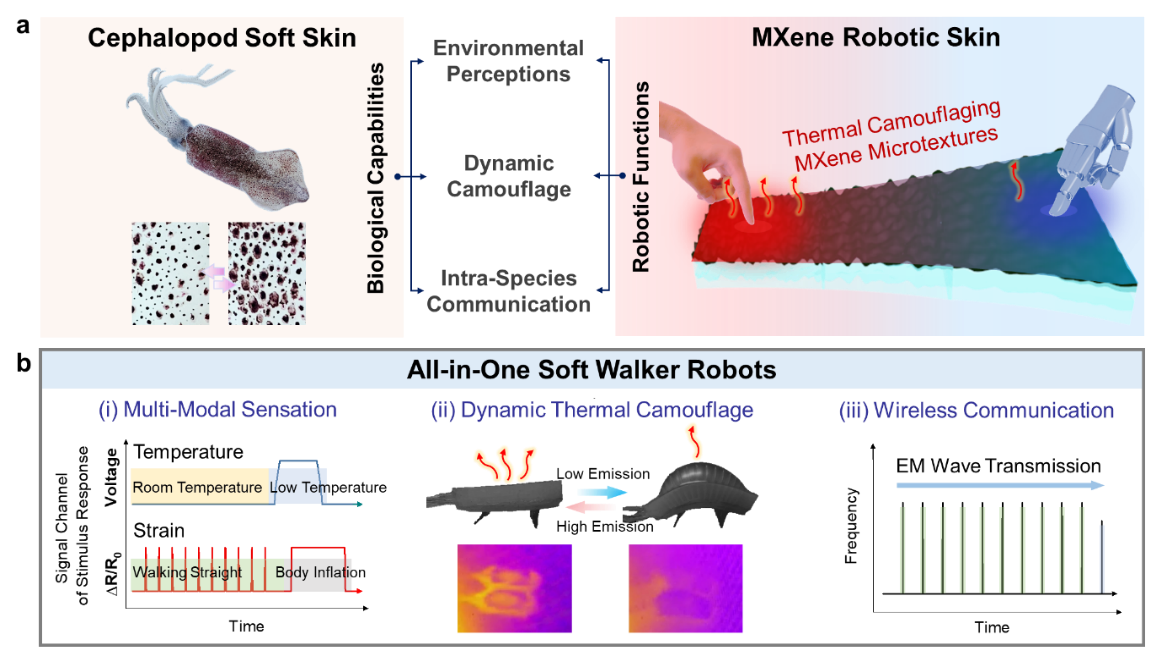
图1. 头足类动物启发的可环境传感的红外伪装软体机器人皮肤
近期,东华大学李克睿研究员联合马里兰大学Chen Po-Yen教授,受海洋中头足类动物皮肤功能的启发(图1),耦合应变工程策略与低维Ti3C2Tx MXene材料独特的光电特性,通过MXene微折皱结构的构筑与尺寸控制,开发了可拉伸、可红外伪装、可环境传感的软体机器人皮肤。MXene微折皱纹理在可逆应变下表现出可控的红外吸收,赋予了仿生软体机器人皮肤可调谐的红外发射,实现了软机器人的动态热伪装(图2);结合介电弹性体致动器的使用,完成了MXene红外伪装阵列的构筑,模仿了类头足动物皮肤表面分散的色素细胞(图3)。得益于固有的热电效应、压阻效应和高电导率,仿生机器人皮肤还分别具有热传感、应变传感、无线微波通信能力(图4),良好地模拟了头足类动物皮肤的多重功能。最后,通过简便、可放大的刷涂工艺,MXene皮肤被完美的装配在软体爬行机器人表面,两个穿着MXene皮肤的软体爬行机器人(“All-in-One”机器人)展示了自适应热伪装能力,能够在热成像摄像头的检测下主动隐藏自己(图5)。

图2. 基于MXene微折皱结构的红外发射可调的软体机器人皮肤
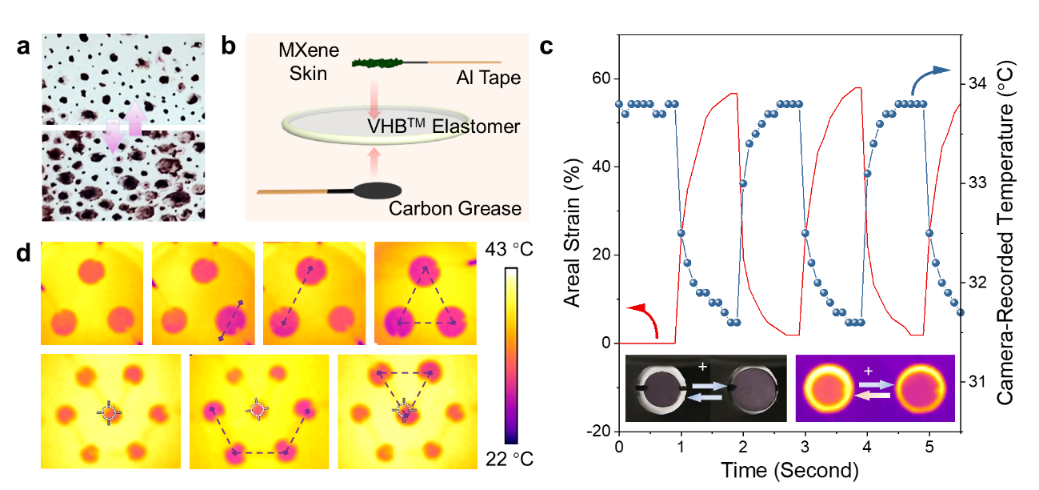
Figure 3. 头足类动物启发的基于介电弹性体致动器的红外热伪装阵列
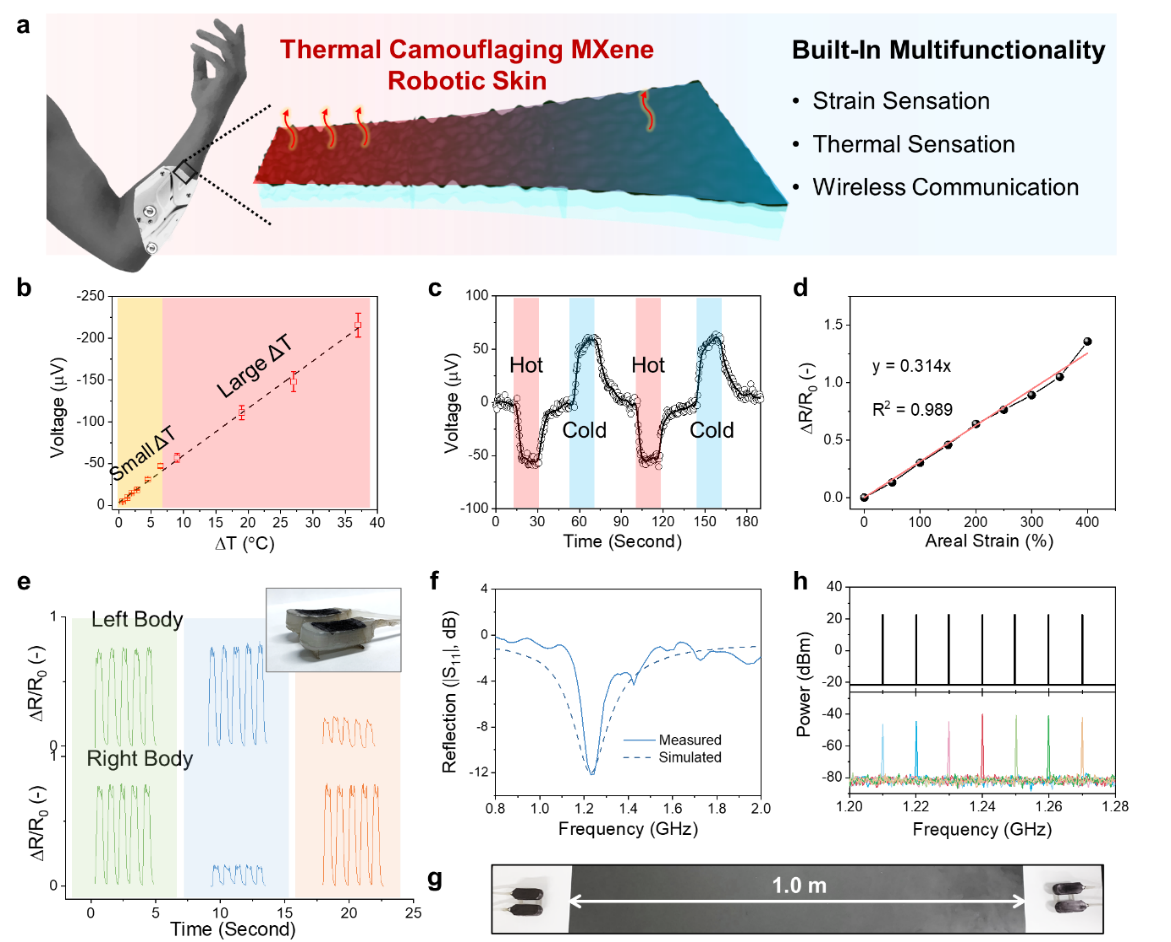
Figure 4. 具有热/应变传感以及无线传输功能的MXene软体机器人皮肤

Figure 5. “All-in-one”软体机器人展现出实时的爬行与环境温度检测以及无线通讯能力
原文链接:https://onlinelibrary.wiley.com/doi/10.1002/adfm.202110534
- 西南交大朱旻昊、樊小强等 Adv. Colloid Interfac.:Ti3C2Tx MXene增强聚合物用于磨蚀防护研究进展 2022-10-13
- 中南民大张爱清教授团队和雷新响教授团队 ACS Nano:Ti3C2Tx MXene液晶 - 一种无背景信号且制备简单的定向介质 2022-04-03
- 西南交大樊小强研究员等 Compos. Part B-Eng.:Ti3C2Tx定向排列 - 显著提升环氧涂层的磨蚀防护功效 2022-02-19
- 加州理工学院高伟课题组 Nat. Mater.:分子级整合弹性体-水凝胶双相材料 - 构建兼具组织粘附与多功能集成的新型生物电子平台 2026-06-12
- 天大汪怀远教授团队 Adv. Mater.:具有高Tg和高强韧的功能树脂材料 - 通过酸碱离子对策略解锁材料多功能集成 2026-01-14
- 华南理工大学黄飞团队 Nat. Commun.:基于p-n导电聚合物的多功能集成电致变色器件 - 从自供电智能窗到微型光谱仪 2025-12-25
- 北航罗斯达教授 Sci. Adv.:激光编程软执行器-解锁仿生软体机器人变形定制新方法 2026-07-04
