港中大张立教授、哈工大谢晖教授Adv. Funct. Mater.:具有变形、环境适应性和多功能的可重构磁性“史莱姆”软体机器人
2022-03-30 来源:高分子科技
磁性微型软体机器人可以无创地进入受限空间,并为微创手术、显微操作和靶向药物递送等生物医学应用提供理想的解决方案。然而,现有的基于弹性体(例如,硅胶,水凝胶等)和基于流体(例如,磁流体,液态金属等)的磁驱动微型软体机器人存在各自的局限性。由于其有限的变形能力,基于弹性体的微型软体机器人难以在极端受限的环境中运动,很难通过小于自身尺寸的通道。相比之下,基于流体的软体机器人变形能力更强,但也受到流体本身形状不稳定的限制,因此对环境的适应能力较差。因此,将极端变形的特性与环境适应性相结合,打造新型软体机器人是一项巨大的挑战。
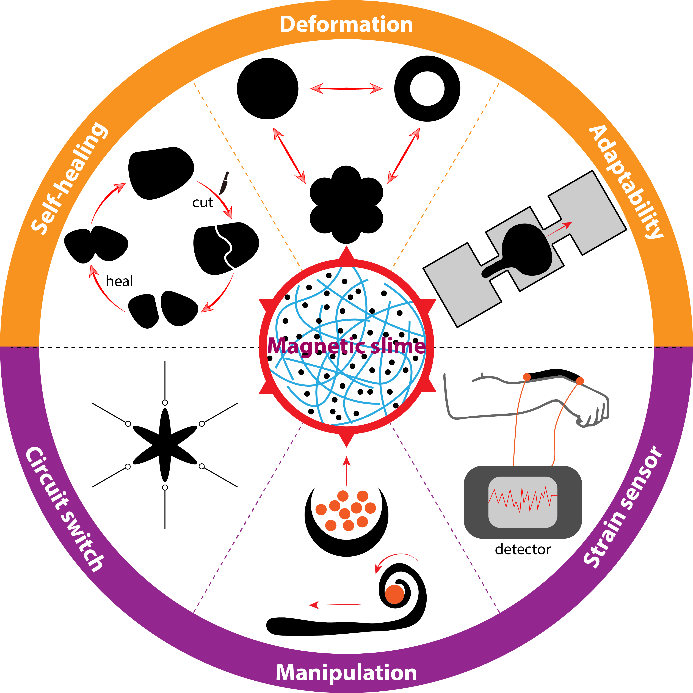

图1 磁性“史莱姆”机器人的环境适应性

图2 磁性“史莱姆”机器人的多模态操纵

图3磁性“史莱姆”机器人用于电路控制和人体运动监测
该工作是张立教授团队近期关于磁驱动微型机器人相关研究的最新进展之一。近年来,张立教授课题组报道了一系列磁驱动微型机器人研究成果,实现了毫米尺度软体机器人磁编程控制和微米尺度机器人群体调控。(Adv. Mater. 2022, 2109126; Sci. Rob., 2021, 6(52); Sci. Adv., 2021, 7(9); Adv. Mater., 2021, 33(4); Adv. Mater., 2021, 33(37); Nat. Commun., 2019, 10(1); Nat. Commun., 2018, 9(1).)
原文链接:https://onlinelibrary.wiley.com/doi/full/10.1002/adfm.202112508
版权与免责声明:中国聚合物网原创文章。刊物或媒体如需转载,请联系邮箱:info@polymer.cn,并请注明出处。
(责任编辑:xu)
相关新闻
- 斯坦福大学赵芮可团队 Adv. Mater. 综述: 电磁驱动功能材料 2026-01-17
- 西安交大唐敬达课题组《ACS AMI》: 三相态磁驱动微型机器人 2024-01-25
- 中国科大龚兴龙团队:反映各向同性软磁流变弹性体动态磁驱动行为的力磁耦合模型 2023-12-27
- 北航罗斯达教授 Sci. Adv.:激光编程软执行器-解锁仿生软体机器人变形定制新方法 2026-07-04
- UCLA贺曦敏团队 Sci. Adv. 封面:球形无系留自维持滚动机器人 2026-05-01
- 哈工大(深圳)朱时裴教授课题组诚招硕士、博士、博士后 - 材料、化学、物理、机械、生物工程 2025-09-17
- 西安交大李涤尘/贺健康教授团队 Adv. Mater.:水凝胶 “拉一拉” - 实现细胞有序排列 2026-07-23
