随着多材料3D打印技术和智能材料的发展,4D打印近年来引起了极大的兴趣和关注。相较于传统的3D打印,4D打印增加了“时间”这一维度。也就是说,所打印的物体并非静态,其形态或功能能够响应外界诸如温度、光、湿度的刺激,显得智能而机敏。在众多智能材料中,液晶弹性体(Liquid crystal elastomers, LCEs)由于能够在热(或其他条件)的刺激下产生重复、可编程的快速驱动响应而尤获青睐,常被用于4D打印构建软机器人。近年来,研究者们开发了基于墨水直写(Direct ink writing, DIW)的方法来打印LCE,但是此打印方法受限于堆叠式结构,也就是说,LCE只能打印在平台基底或者上一层材料之上,因此打印出来的结构的驱动变形模式也受限制于平面内的收缩,或者单调的弯曲、扭曲变形。也有研究者利用数字光处理(Digital light processing, DLP)来打印LCE,但此方法难以实现分子链的液晶排列,而失去形变驱动功能;即使利用DLP打印机的剪切分离装置,也只能打印薄膜状的单向驱动器,应用十分有限。要打印出能完全发挥液晶弹性体独特驱动优势的复杂三维驱动器或软机器人仍是一大挑战。

鉴于此,佐治亚理工学院齐航教授团队与斯坦福大学赵芮可教授团队合作开发了一种基于混合增材制造的新型4D打印方法,以其中的激光辅助原位固化DIW模块来打印具有-40%应变的悬空LCE。结合下沉式DLP模块打印的软、硬结构材料或可溶解支撑材料,该方法能够一站式打印机敏复合晶格结构,机敏张拉整体,稳定性可控结构,也首次实现了LCE复杂三维晶格结构的4D打印。文章以“4D Printing of Freestanding Liquid Crystal Elastomers via Hybrid Additive Manufacturing(基于混合增材制造的独立液晶弹性体4D打印)”为题,在线发表于《Advanced Materials》上,并被选为期刊内封面。

图1:悬空4D打印独立LCEs材料与原理
为了实现LCE的悬空4D打印,该团队特别设计了含有光固化交联剂(PETA)的LCE墨水,并在DIW挤出打印的同时使用四个激光二极管(450 nm, 4X5mW)原位同步固化LCE,实现了LCE结构的空中快速光固化定型。此外,为了防止DIW系统的激光干扰固化DLP墨水,研究者们特别选用了具有不同光敏波段的光引发剂(LCE使用PI784,DLP墨水使用PI819),来配合特定波长的激光(450 nm,只能激发PI784,不能激发PI819)和光吸收剂(SUDAN I,有效吸收450 nm蓝光)。

图2:LCE墨水及打印参数表征
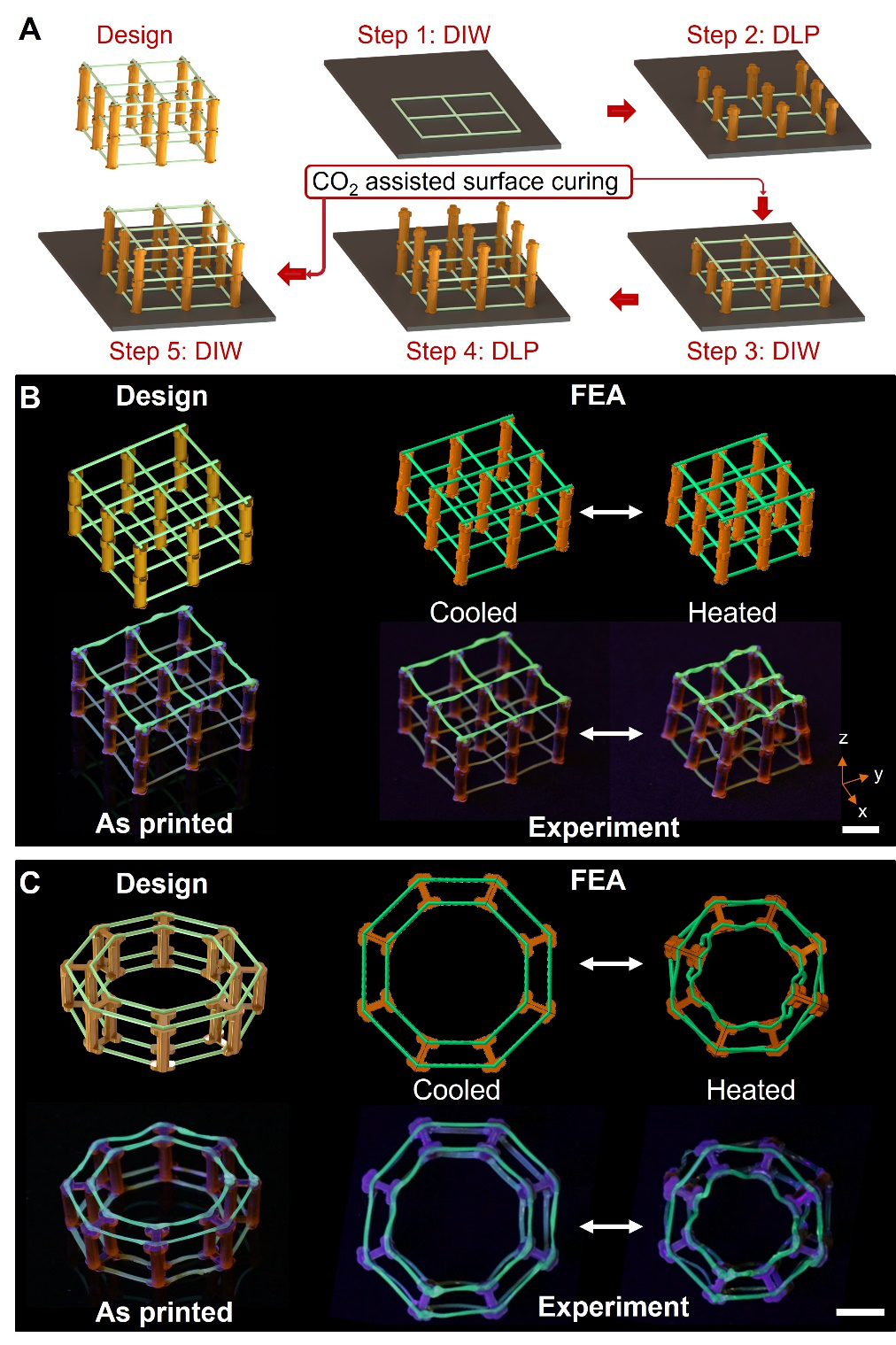
图3:嵌入机敏LCE的复合晶格结构的混合打印

图4:混合打印机(A)敏张拉整体与(B)稳定性可控结构
研究者们还进一步展示了这种悬空LCE纤维的另一用途——调节结构的稳定性。如图4B所示的,由软质DLP墨水打印的四边形的结构在承载负荷时并不稳定。常温下,此结构中悬空的LCE纤维并非绷直,而呈松弛状态,因此并不能为四边形结构提供稳定支撑。然而LCE一旦受到加热,便被驱动而收缩,为四边形结构提供了三角形的稳定支撑。因此,本结构的稳定性可由温度来调节,并实现大负荷的驱动(荷重比~123)。
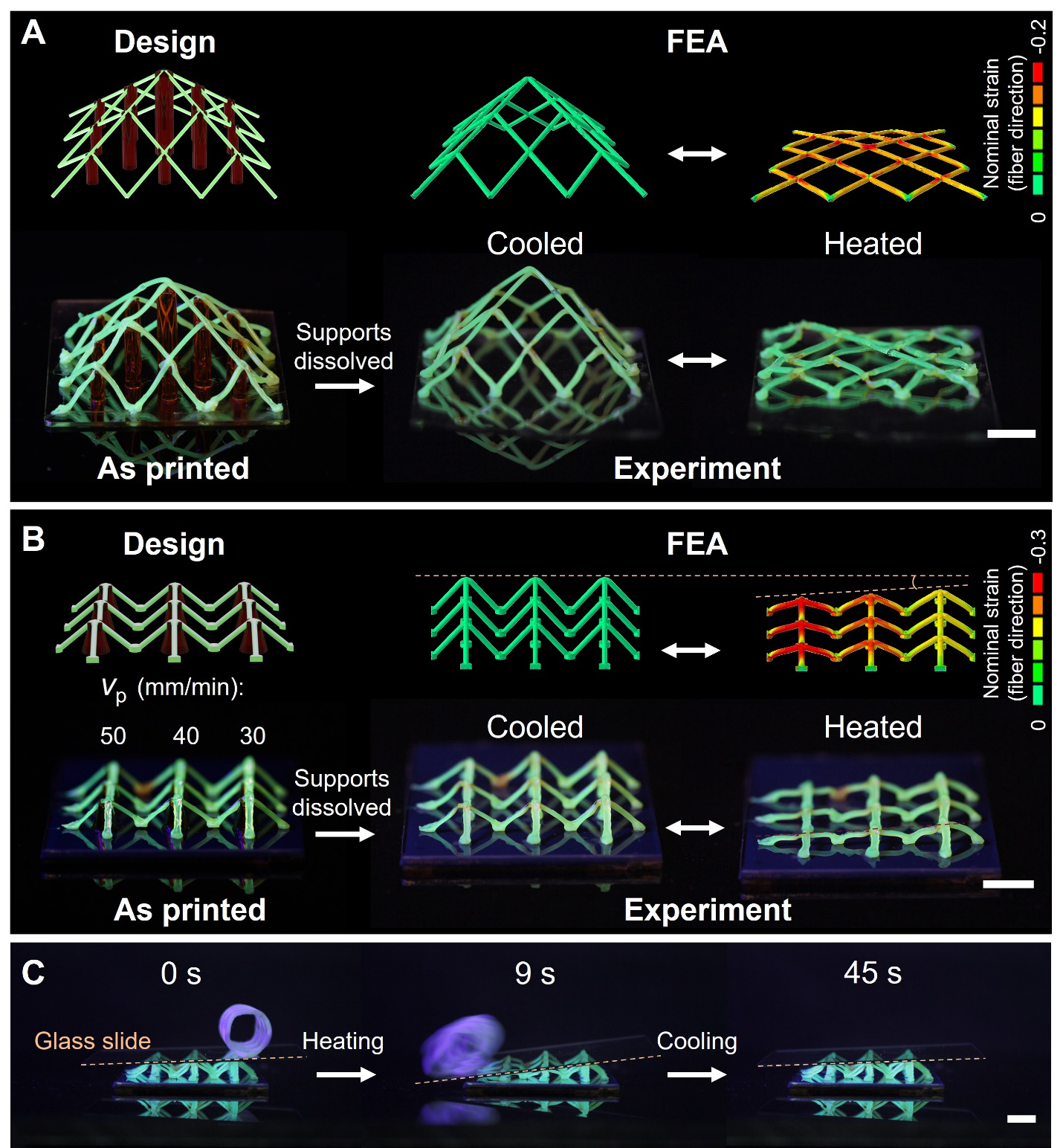
图5:三维空间LCE晶格结构
小结
该工作提出了一种结合了激光辅助DIW和DLP的混合式4D打印方法,赋能悬空打印独立式LCE,极大地拓展了LCE机敏结构的设计空间,为LCE软机器人的设计提供了广阔的思路。
原文链接:https://doi.org/10.1002/adma.202204890
- 西南交大孟凡彬教授团队 Adv. Mater.:突破静态限制!仿生4D打印解锁动态自适应电磁调制新范式 2026-06-06
- 哈工大冷劲松/哈医大郭媛媛 AFM:抗凝促内皮化4D打印心脏封堵器 2026-04-01
- 哈尔滨工业大学冷劲松教授团队《Adv. Mater.》:4D打印水凝胶实现高效大气集水 2026-01-02
- 南开大学刘遵峰合作团队 AM:破解液晶弹性体纤维力学-驱动-阻尼三元矛盾→揭示全新连续液晶相变过程 2026-07-10
- 斯坦福赵芮可教授团队 Nat. Commun.: 具有时空可编程表面褶皱的光热驱动液晶弹性体多功能平台用于信息编码与物体操控 2026-07-01
- 天津大学封伟教授团队 Angew: 胆甾液晶弹性体变色光子材料前沿进展 2026-06-22
