浙大王立教授和俞豪杰副教授团队 AFM:受贻贝粘附蛋白启发的聚合物液晶弹性体及其光/热响应软体驱动器
2023-01-16 来源:高分子科技
软体驱动器因其在软体机器人、微型发动机、人造肌肉和生物医疗等领域的广阔应用前景而备受关注。液晶弹性体(LCEs)是制造软体驱动器的理想材料之一。然而,传统基于稳定共价交联的LCEs通常面临形状结构设计灵活度低以及驱动形变单一等问题。近年来研究发现,在LCEs网络中引入动态可交换键为制造具有复杂驱动形变、可定制形状以及可编程的动态软体驱动器带来了新策略。用这种方式制备的动态LCEs网络通常还具有自愈性、可回收性和可焊接性等优点,更加适应实际应用的需求。此外,传统热响应驱动器的直接加热驱动方式具有较大的局限性,需要特定的驱动场景或环境。通过在传统LCEs内引入额外的有机或无机光热添加剂,使其能够通过光热转换效应实现光响应驱动,进而提高其操作的可控性和灵活性,可显著提升LCEs的应用范围。然而,光热添加剂的团聚、渗出以及毒副作用等问题是光驱动动态LCEs驱动器所面对的重要挑战。

图1. LCEs的制备及结构表征
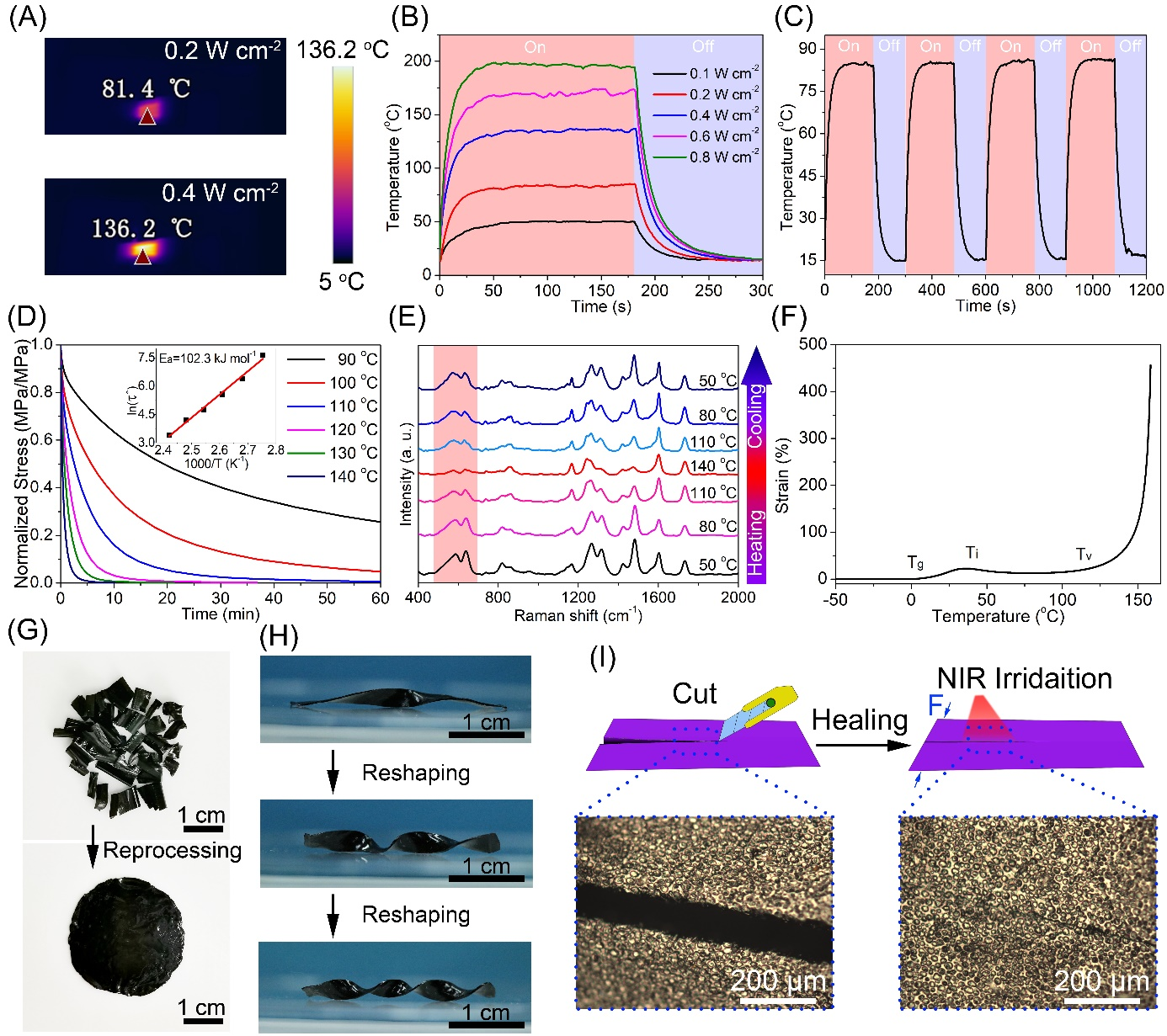
图2. LCEs的光热转换性能以及网络动态特性
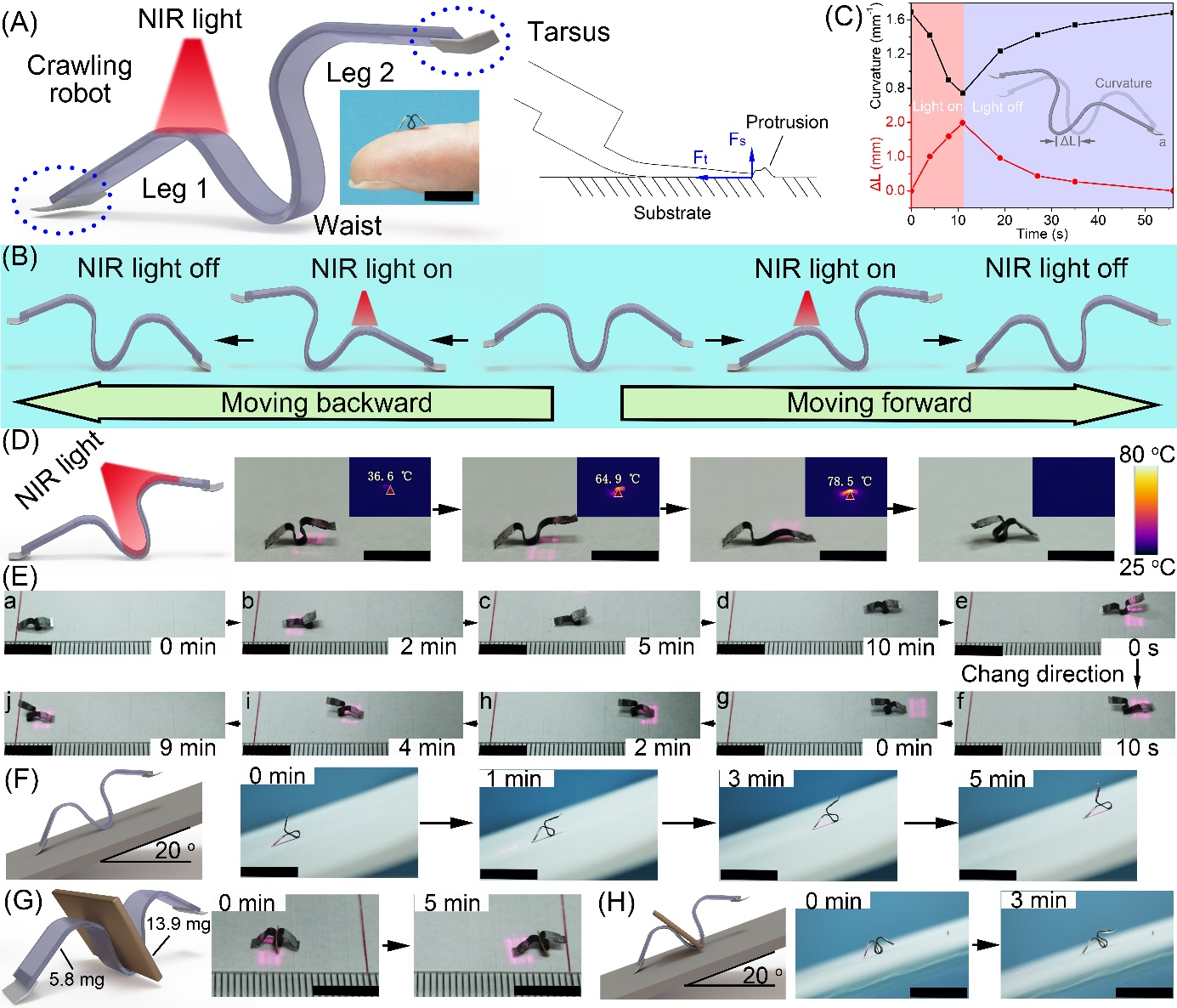
图3. 基于液晶相转变驱动的陆地爬行机器人概念及应用
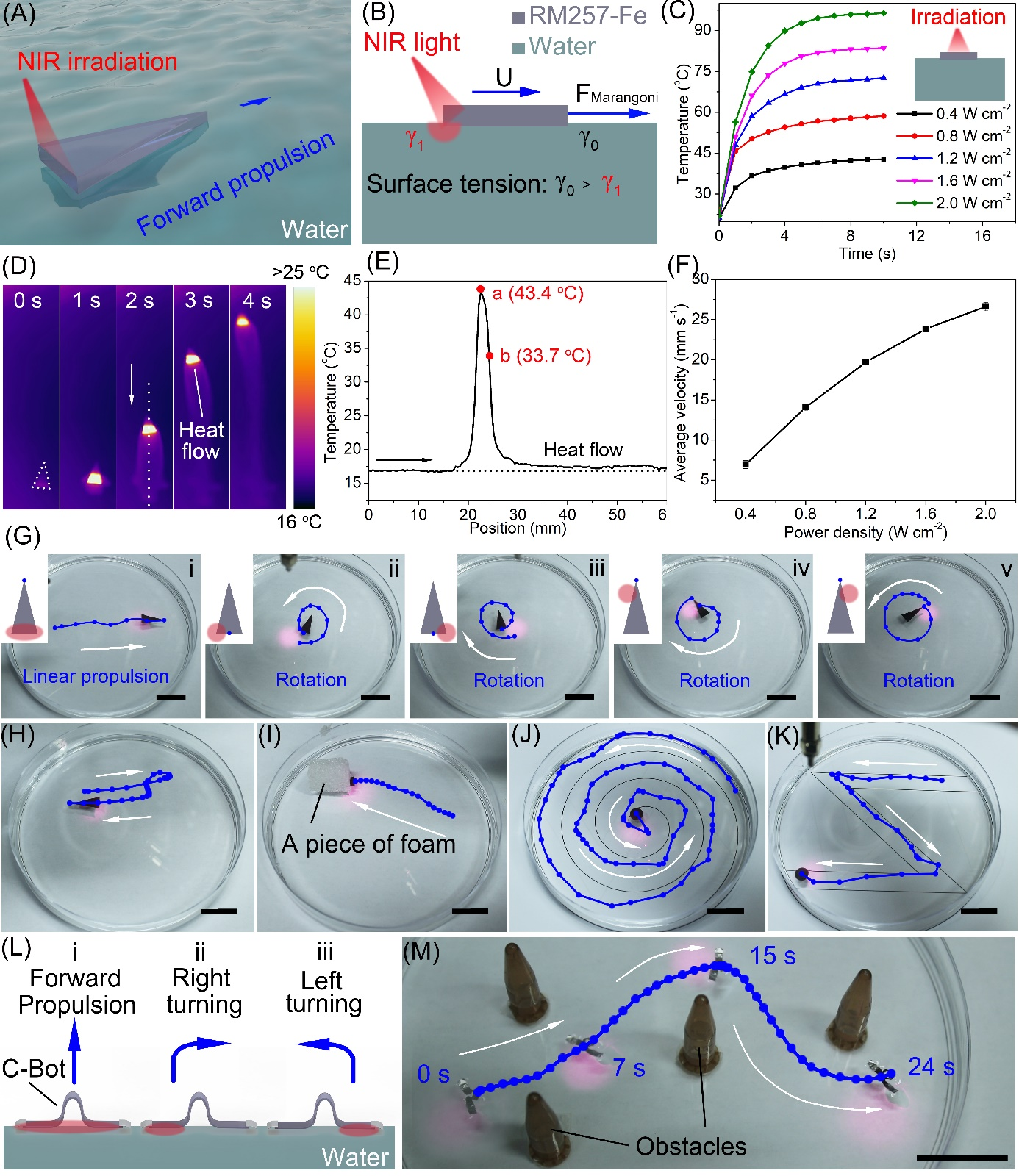
图4. 基于Marangoni效应驱动的水面移动机器人概念及应用
论文链接:https://onlinelibrary.wiley.com/doi/full/10.1002/adfm.202211914
版权与免责声明:中国聚合物网原创文章。刊物或媒体如需转载,请联系邮箱:info@polymer.cn,并请注明出处。
(责任编辑:xu)
相关新闻
- 南开大学刘遵峰合作团队 AM:破解液晶弹性体纤维力学-驱动-阻尼三元矛盾→揭示全新连续液晶相变过程 2026-07-10
- 斯坦福赵芮可教授团队 Nat. Commun.: 具有时空可编程表面褶皱的光热驱动液晶弹性体多功能平台用于信息编码与物体操控 2026-07-01
- 东华大学丁彬/李召岭 AFM:液晶纺丝制备高强韧纤维素离子凝胶纤维 2026-07-01
- 北化曹鹏飞教授、田明教授 Adv. Mater.:疏溶剂弹性体涂层“筛分”离子构筑双层SEI助力低温电池超稳循环 2026-07-04
- 大阪大学肖淳林、Yuichiro Kobayashi、Hiroyasu Yamaguchi团队 Nat. Commun.:多重能量耗散途径按顺序激活实现弹性体增韧 2026-07-03
- 南开大学关英/天工大张拥军 AFM:综合性能优异的离子导电弹性体 2026-06-29
- 宾大杨澍团队、UCLA金丽华团队 Science:把“打结”变成动力 - 会跳、会翻、还能“飞回来的”软体微型驱动器 2026-04-24
