人工肌肉(AM)是指在外界刺激(如温度、湿度、电刺激及光照等)下产生可逆收缩、伸长和旋转运动的智能驱动材料,基于聚合物纤维(如尼龙6、尼龙66、聚对苯二甲酸乙二醇酯、氨纶等)制备的人工肌肉,由于其质量轻、致动效率高及可设计性强等特性,可应用于仿生驱动、扭热制冷及能量收集等领域,其中,尼龙6钓鱼线人工肌肉具有较为优异的致动性能。聚甲醛(POM)是一种高密度、高结晶的线型热塑性工程塑料,综合性能优异,POM纤维具有高强高模、耐摩擦磨损性优良等特性,相较于尼龙纤维,其吸水率极低,仅为0.2%,而尼龙纤维高达2%,同时其耐化学腐蚀性优异,性价比高,有望赋予人工肌肉更加稳定的致动性能;然而,POM结晶能力强,结晶度高,其纤维结晶度可达85%,非晶区含量少,导致其分子链在外界刺激下的构象熵变化较小,无法达到理想的致动效果,目前基于POM纤维人工肌肉的相关研究鲜有报道。
近期,四川大学高分子研究所、先进高分子材料全国重点实验室叶林教授团队在POM纤维取向结晶结构调控及其人工肌肉构筑等研究方面取得重要进展。引入与POM相容性良好的热塑性聚氨酯弹性体(TPU),采用熔融纺丝-热拉伸/热定型工艺制备POM/TPU共混纤维,实现POM纤维取向因子(fc:0.37-0.83;fa:0.58-0.88)及非晶区含量(17.3%-62.3%)的大范围调控;在此基础上,采用加捻卷绕方式制备了POM纤维基中空芯轴型人工肌肉。随纤维拉伸倍率和TPU含量增加,纤维取向因子和非晶区含量的提升有助于大量沿轴向排列的非晶区分子链在热刺激下的构象熵大幅增加,显著增强了其人工肌肉的致动性能;加捻时间、芯棒直径及纤维并股数等结构参数对人工肌肉的致动行为也表现出不同程度的影响,其中,对于8股POM/20T-600%f纤维束并股后加捻6 min 30 s、采用直径为1.0 mm芯棒卷绕制备的人工肌肉,在14 V致动电压及200负载自重比下,其最大收缩应变和单位质量的做功能力为40.23 %和34.69 J·kg-1,分别达典型哺乳动物骨骼肌的201 %和434 %。
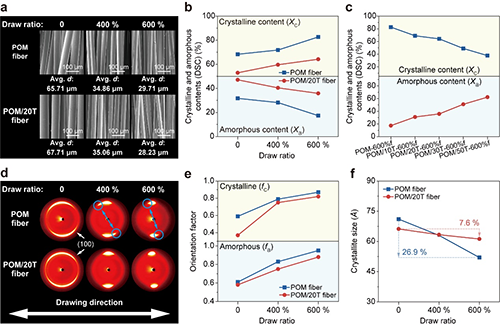
图1 TPU的引入实现POM纤维取向结晶结构的调控

图2 TPU含量对POM纤维基人工肌肉致动行为的影响
研究了POM纤维基人工肌肉的稳定致动行为及机制,POM及POM/TPU纤维的取向结晶结构在室温(1st 25°C)、升温至致动温度(2nd 125°C)以及降温至室温(3rd 25°C)的致动过程中表现出较好的稳定性,可作为物理交联网络防止非晶区分子链的解缠与滑移,致使其人工肌肉经1000次致动循环周期后的收缩应变保留率高达95.57%及96.32%,具优异的循环致动稳定性;同时在1 mol·L-1 NaOH溶液耐碱性试验中,POM纤维基人工肌肉的最大收缩应变保持率达94.11%,远高于基于商用尼龙66缝纫线的人工肌肉(53.56%),作为先进柔性驱动材料展现出在智能可穿戴设备、工业机器人和深海勘探等领域的应用潜力。
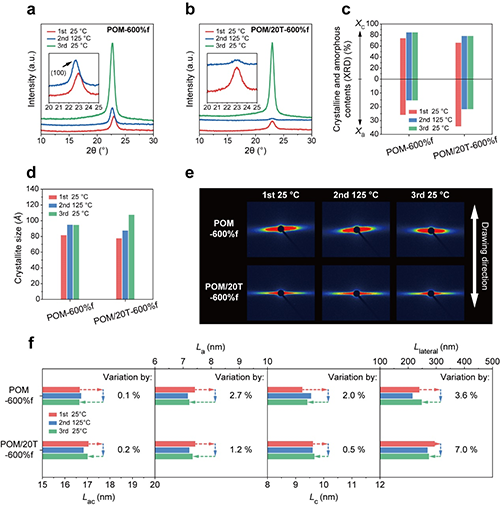
图3 POM纤维基人工肌肉的稳定致动机制
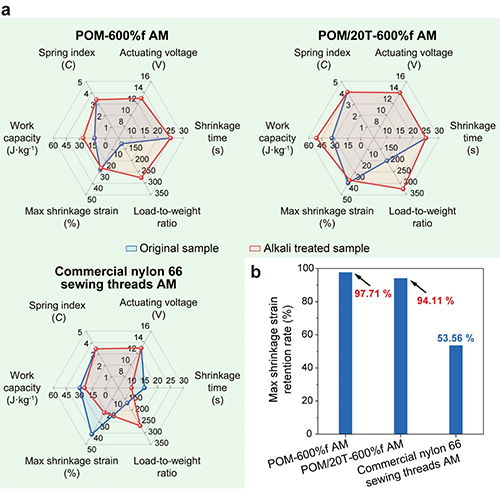
图4 POM纤维基人工肌肉优异的耐碱稳定性
该工作以“A Novel Polyoxymethylene Fiber-Based Artificial Muscle Enabled Stable Actuating Behavior”为题发表于Small,四川大学高分子研究所博士研究生孔维尧为论文第一作者,叶林教授为通讯作者。
文章信息:Weiyao Kong, Xiaowen Zhao, Lin Ye*, A Novel Polyoxymethylene Fiber-Based Artificial Muscle Enabled Stable Actuating Behavior, Small, 2025, 2502065.
https://doi.org/10.1002/smll.202502065
- 东华大学张青红教授等 AFM:基于高强导电同轴MXene纤维的多响应人工肌肉 2026-06-15
- 华南理工刘伟峰、广东工大邱学青 AFM:木质素构筑动态液晶双网络 - 打造高性能光热驱动人工肌肉 2026-03-27
- 武汉纺大夏治刚/南开刘遵峰/中国药大周湘 Matter:扭转自振荡人工肌肉 2026-02-08
