近日,西湖大学工学院姜汉卿团队提出了一种类肌肉收缩的新型电磁弹性体驱动机制,将传统高输出的电磁驱动高效扩展至软体机器人与昆虫尺度微型机器人领域。该机制不仅具备优异输出力和大形变能力,还可在低电压条件下稳定工作,实现了在户外环境中的完全自主驱动。为未来小型化、无线化、高性能的智能昆虫机器人系统提供了全新解决方案。
相关研究成果以“Muscle-Inspired Elasto-Electromagnetic Mechanism in Autonomous Insect Robots” 为题发表于《自然-通讯》(Nature Communications)。
在自然界中,动物通过肌肉的收缩与放松产生强大动力,实现灵活高效的运动,尤其在昆虫等小尺度生物中,肌肉所具备的高力质量比对于克服环境阻力至关重要。相比之下,目前多数自主机器人仍依赖刚性电机及其配套的齿轮、轴承等复杂结构,难以柔性集成到软体系统中,且在尺寸微型化方面存在显著障碍。尽管近年来“人工肌肉”等智能材料驱动技术备受关注,但它们通常需要苛刻的驱动条件(如高电压、强磁场或强光照),且输出性能有限,难以支撑小型系统的高效自主运行。因此,现有的微型软体机器人仍多依赖外部刺激,尚难实现真正的无线化、户外化和自主化运动。
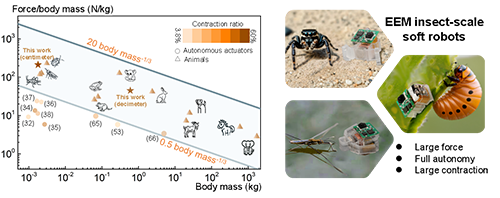
图1:动物与自主机器人的输出力质量比与收缩变形能力
为满足微型软体机器人对高输出、大形变、快速响应和低能耗驱动的需求,西湖大学姜汉卿团队提出了一种新型“电磁弹性体驱动机制”(Elasto-Electromagnetic mechanism, EEM)。不同于传统人工肌肉主要依赖软材料本征特性对强外场响应、导致驱动条件苛刻,EEM 通过弹性体的结构化设计,结合硬磁与软磁间的强磁吸力,模拟生物肌肉的收缩,实现高效驱动。
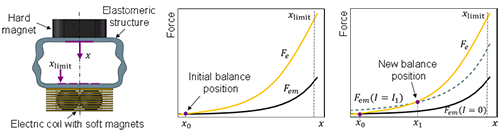
图2:动物与自主机器人的输出力质量比与收缩变形能力
该机制由三部分构成:硬磁体、嵌有软磁球的电流线圈,以及可变形的弹性体结构(如图2)。其核心在于两点:一是利用硬磁与软磁间的静态磁吸力驱动弹性体收缩,电流输入可同时引入洛伦兹力并增强软磁响应,从而动态调节吸力、提高输出力和变形幅度;二是通过弹性体结构中力-位移曲线的设计,实现多样化、可调控的力学响应与驱动行为。

图3:动物与自主机器人的输出力质量比与收缩变形能力
其工作原理如“拉锯式”力平衡调控:在无电流状态下,磁吸力与弹力平衡于自然松弛位置;通电后,增强的磁吸力推动驱动器收缩至新稳定态;调节电流大小,即可精确控制系统收缩程度。该机制具备双向调控能力,不仅实现高达 210N/kg 的单位输出力、60% 的大形变量及低至 <4V 的驱动电压,还可通过结构设计实现“免持续供电”的双稳态甚至三稳态锁定,大幅提升能效。整体结构紧凑、易于微型化,展现出接近生物肌肉的高效驱动特性,为构建真正无线、自主、环境适应性强的昆虫尺度机器人提供了新路径。
基于这一新型电磁弹性体驱动机制,研究团队进一步构建出一系列具备完全自主驱动、高输出力和大形变能力的昆虫级软体机器人原型。在多种机器人中,蠕动式爬行机器人展现出卓越的抗冲击性能与环境适应能力。凭借EEM驱动系统带来的结构柔顺性与微型化体积,该机器人即使从约30米高空坠落,仍可在着陆后继续自主匍匐,无任何功能损伤。这种极端生存能力为其在复杂、不可预测的野外环境中部署奠定了基础。未来,这类柔性机器人有望由无人机集群高空投放,深入灾难现场的废墟缝隙,执行搜救侦察与信号标记等关键任务。
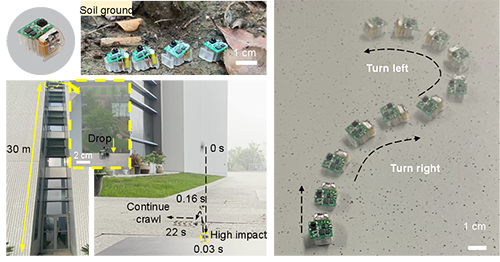
图4:动物与自主机器人的输出力质量比与收缩变形能力
此外,团队还开发出一款仿水螅结构的软体游泳机器人,能够在完全自主供能条件下,于自然水体中持续稳定游动超过一小时,展现出优异的续航性能与环境适应性,为水下环境监测与污染探测等任务提供了微型化平台的可能。
值得一提的还有跳跃机器人,其体型仅指尖大小,却具备完全自主驱动能力,是目前已知最小可实现连续弹跳的软体跳跃机器人。该系统通过极简结构实现高效能量释放与强弹跳表现,后续优化有望进一步提升跳跃高度与稳定性,为其在复杂地形下的实地应用打开新空间。
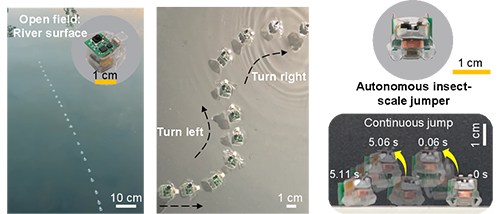
图5:动物与自主机器人的输出力质量比与收缩变形能力
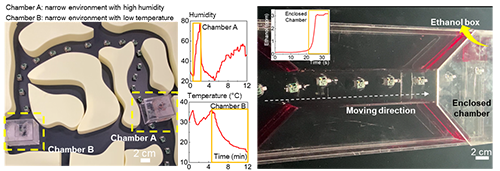
在此基础上,研究人员进一步展示了基于EEM驱动机制的昆虫级机器人在搭载多种传感器后执行环境感知任务的潜力。例如,团队在蠕动式爬行机器人上集成了微型温湿度传感器,使其能在自主行进过程中实时探测并无线传输不同环境舱室中的温湿数据;在仿水螅游泳机器人上则集成了酒精气体传感器,成功实现了对密闭水体中化学信号的探测与上报。这些演示验证了EEM平台不仅具备强力驱动能力,也能够灵活搭载多种物理与化学传感器,具备面向复杂、狭小环境中数据采集与任务执行的广泛拓展性。
该研究以磁势能与弹性势能的平衡为基础,提出了一种将传统电磁驱动拓展至软体机器人的全新机制。该机制由软硬磁体之间的强磁吸引主导形变,突破了以洛伦兹力为核心的传统驱动方式,显著提升了微型软体机器人的输出力与形变能力。通过对弹性体结构的合理设计,该系统还能实现低功耗、高能效的稳态驱动。结合其在自主运动、环境适应、能耗调控与任务集成等方面的优势,该平台为灾后搜救、环境监测及生物信号探测等应用场景提供了强有力的技术支撑与发展潜力。
此项研究工作的第一作者为西湖大学博士后许昌瑀和博士后曹亚军。西湖大学工学院讲席教授姜汉卿为通讯作者。该工作受到了国家自然科学基金以及西湖大学相关经费的支持。
原文链接:https://www.nature.com/articles/s41467-025-62182-2
- 杭师大朱雨田教授、陈建闻副教授/南开刘遵峰教授 AFM:基于多尺度亲水-疏水界面超快响应与超大形变的湿气响应Janus纤维驱动器 2025-10-18
- 清华大学梁福鑫/杨振忠教授团队 Adv. Mater.: 在Janus颗粒调控高分子复合材料分层结构方面取得进展 2024-02-02
- 吉林大学任露泉院士团队《Adv. Funct. Mater.》:大形变、快响应的人工肌肉驱动器 2019-12-31
- 北航罗斯达教授 Sci. Adv.:激光编程软执行器-解锁仿生软体机器人变形定制新方法 2026-07-04
- UCLA贺曦敏团队 Sci. Adv. 封面:球形无系留自维持滚动机器人 2026-05-01
- 哈工大(深圳)朱时裴教授课题组诚招硕士、博士、博士后 - 材料、化学、物理、机械、生物工程 2025-09-17
