在自然界中,细菌等微生物能够在没有外部提示的情况下,通过自我推进和感知环境做出导航决策。尽管近年来,科学家们在合成智能微纳米机器人方面取得了一些进展,使它们能够自我推进,但它们仍然无法像生物体那样,具有复杂的导航和决策功能。
近日,华中科技大学化学与化工学院瞿金平院士/牛冉研究员团队联合达姆施塔特工业大学Benno Liebchen教授团队在《Proceedings of the National Academy of Sciences of the United States of America》杂志在线发表了题为“Automated decision-making by chemical echolocation in active droplets”的研究文章。该研究展示了一种全新的“化学回声定位”机制,能够让合成的液滴马达像生物体一样自主决策和导航,这些微小液滴能够在复杂迷宫中避开障碍物并向前移动——而这一切都不依赖于任何外部场的控制。该机制利用自推进的微纳米机器人(如液滴或活性胶体)所产生的化学浓度梯度和水动力流,在环境中生成化学信号并感知障碍物。这些信号会被墙壁、障碍物或其他物体反射回来,产生“回声”。反射回来的“回声”巧妙地将液滴从封闭的路径中推开,导引其朝向开放的路径运动。该液滴马达持续生成自己的信号,并根据这些信号从环境中的“回声”来做出决策。
为了验证这一机制,研究团队使用由聚乙烯亚胺(PEI)和聚苯乙烯磺酸钠(PSS)络合而成的毫米级液滴进行实验。这是一种通过自生聚电解质浓度梯度驱动的水-水液滴马达。它在自固化时释放可降低表面张力的聚电解质PSS,从而降低周围水的表面张力,进而诱导液滴自主推进。当这些液滴被放置在充满水的迷宫中时,它们自发地开始运动,令人惊讶的是,它们无需任何外部指引,便能顺利地导航到出口。高速录像显示,液滴在接近交叉口时会减速,感知来自死胡同的化学“回声”,并及时转向避开。通过重复实验,大多数液滴成功地解决了迷宫问题,且随着迷宫长度的增加,液滴的导航时间逐渐增加,到达出口的成功率可保持在80%以上。模拟结果与实验结果显示一致,液滴在每个交叉口都能做出正确选择,并有效地到达出口。更重要的是,该结果对复杂迷宫具有鲁棒性。与此相比,传统的依赖于化学源进行迷宫探索的方法在迷宫尺寸增大时变得不可靠,因为随着距离的增大,引导信号会减弱。
这种自动独立决策的能力展示了合成活性物质系统如何仅通过物理机制实现导航功能,而无需像生物体那样依赖复杂的生化机制。由于“化学回声定位”不需要集成电子设备和外部传感器控制,这一机制理论上可以缩小到更小的尺寸,并应用于更加复杂的环境中。例如,液滴可以在狭窄的微流控通道中导航、探索封闭空间或沿复杂路线输送小型货物。这些系统可以在传统微纳米机器人技术无法应对的环境中发挥作用,该研究结果为自主微观系统的发展提供了理论指导。
论文第一作者为达姆施塔特工业大学的Aritra K. Mukhopadhyay博士和华中科技大学化学与化工学院博士研究生付琳慧。论文通讯作者为华中科技大学化学与化工学院牛冉研究员,论文作者还包括华中科技大学瞿金平院士,赵强教授,博士研究生冯凯以及达姆施塔特工业大学的硕士生Christopher Fujta和Benno Liebchen教授。该研究得到国家自然科学基金的资助。
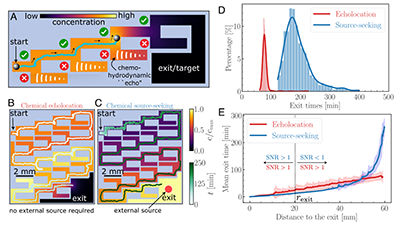
图1 具备自主决策能力的活性液滴马达解决迷宫问题
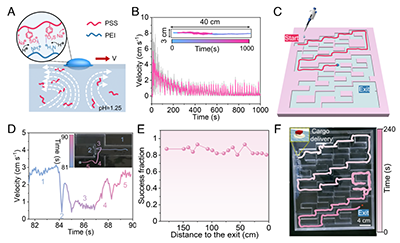
图2 基于化学回声定位策略的液滴马达解决迷宫问题的实验结果
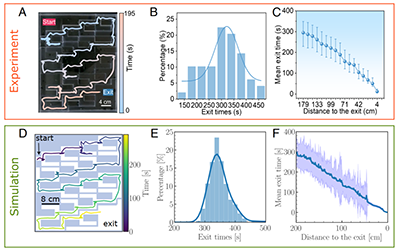
图3 液滴马达解决迷宫问题的实验与模拟结果对比
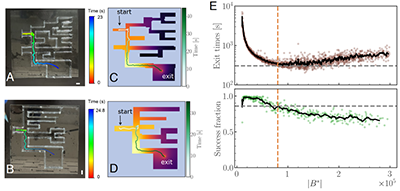
图4 化学回声定位策略对于不同几何形状和参数下迷宫的鲁棒性。
全文链接:https://www.pnas.org/doi/10.1073/pnas.2526773123
作者简介:

牛冉,华中科技大学化学与化工学院研究员、博士生导师、国家重点研发计划青年项目首席科学家,主要研究领域为功能高分子材料及微纳米机器人。目前以第一或通讯作者身份在PRL、PNAS、Sci. Adv.、Energy Environ. Sci.、ACS Nano、Adv. Sci.等具有重要影响力的国际刊物上发表SCI论文80余篇,获授权专利6项,申请专利8项。主持承担国家自然科学基金、重点研发计划青年科学家项目等国家和省部级科技项目多项,并获得湖北省海外高层次人才计划、武汉英才等多项荣誉奖励。担任Rare Metals期刊 (中科院1区,影响因子6.3),Exploration和Energy Materials期刊青年编委。
- 暂无相关新闻
