北卡州立尹杰、苏浩团队 Sci. Adv.:物理智能软机器人自发逃离迷宫
2023-09-12 来源:高分子科技
自主逃离迷宫对于软体机器人来说是一个有趣且非常有挑战性的课题。迷宫通常用来衡量与测试机器人对周围环境的处理、计算以及应变能力,一定程度上反应了机器人的智能水平,从而用于探索未知的复杂环境。挑战性在于软体机器人通常需要在其柔软身体上集成动力、传感器和控制等硬件来实现类似人脑的决策以及执行功能。目前软体机器人逃离迷宫往往是通过两种途径来完成:一种是通过人为操作机器人逃离,比如通过远程控制外加磁场或者光源,可以实现无牵引软机器人,但无法让软机器人自我决定运动路径,从而缺乏智能。另一种则是通过机载的电源和控制器来完成。这种方式也有弊端,比如结构以及控制复杂,无法自主求解复杂迷宫等等。

与传统的基于处理器计算控制的具备“大脑”的机器人相比,该软体机器人不再需要“大脑”,也就是不需要任何电子设备和计算机控制,可以依靠自身的材料智能 - 液晶弹性体,一种热源或光源响应的活性软材料,与结构智能相结合 - 两端具有扭转和螺旋形状的不对称几何扭带结构,由环境热能来自我驱动滚动与路径抉择。该软体机器人可以与周围环境以及障碍物进行交互式互动与作用,来实现自我感知障碍物,自我避障、以及自我路径选择与决定等功能。
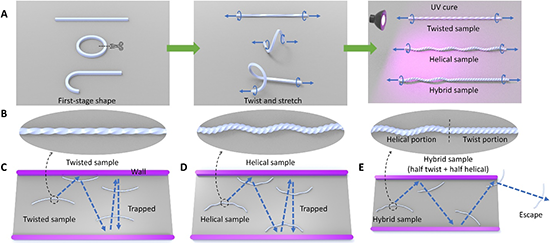
图1:结构对称与非对称扭带状软机器人自主逃逸单通道迷宫单元对比。

图2:软体机器人自主逃逸复杂迷宫
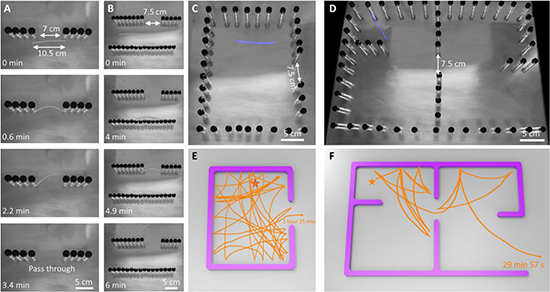
图3:软体机器人穿过狭缝以及逃离具有狭缝的迷宫
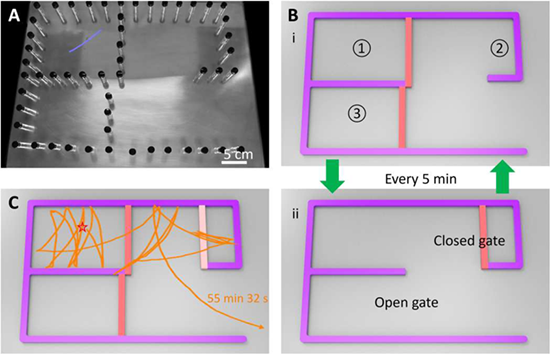
图4:软体机器人逃离随时间变化的迷宫
原文链接:https://www.science.org/doi/10.1126/sciadv.adi3254
版权与免责声明:中国聚合物网原创文章。刊物或媒体如需转载,请联系邮箱:info@polymer.cn,并请注明出处。
(责任编辑:xu)
相关新闻
- 南京邮电大学赵强/马云/张雨霞团队 Nat. Commun.:实现具有高发光不对称因子的稳定胆甾相液晶聚合物网络 2026-05-23
- 中科院化学所赵彤研究员课题组 AFM:基于液晶工程的双有序策略制备兼具高强度与高导热性能的邻苯二甲腈纳米复合材料 2026-05-21
- 苏科大李琳团队/南邮李炳祥团队 Adv. Mater.:具有多重刺激响应性的形状记忆胆甾相液晶弹性体 2026-05-10
- 四川大学王玉忠团队 AFM:兼具高强度、韧性与回弹性的热塑性弹性体 2026-06-03
- 中国林科院林化所张猛/悉尼大学程文龙/南昆大宋平安 Adv. Mater.:含磷/氮及π-共轭联苯结构单元实现弹性体高强、高韧、阻燃及自修复 2026-06-01
- 浙江大学凌君教授课题组 Macromolecules:无金属催化剂催化两仪聚合构筑聚氨基酸热塑性弹性体 2026-05-03
- 香港中文大学冯伟、何奇洸助理教授和张立教授 Adv. Mater. 综述:基于液晶聚合物的物理智能软体机器人与制动器 2024-02-22
