自然界生物体系通过连续对称性破坏以及反馈调节机制,实现复杂、可控的运动机能。设计制备具有智能驱动、自动控制功能,且能够自发持续运动的软体机器人仍是该领域的挑战性难题,其难点在于难以复制生命体中的生物响应、神经控制、自我调节等特征。目前,大多数软体机器人通过动态外界刺激操控对称性破坏与回复,实现定向持续运动。一些软体机器人依靠自遮挡效应、震荡化学反应形成反馈回路,实现驱动、运动的自动控制;但是,这些运动通常是震荡模式,设计具有平稳、自发、持续运动能力的软体机器人具有重要的科学意义。相对于几何结构的重要性,软体机器人拓扑结构在驱动控制以及自发运动中的作用少有涉及。
近日,浙江大学郑强教授、吴子良教授与南方科技大学洪伟教授以响应性水凝胶制备具有不同拓扑结构的软体机器人,实现了静态光照条件下的自发持续运动。研究表明拓扑结构增强了局部变形的关联性,缠绕关联的自遮挡效应以及旋转运动的自相似性共同赋予拓扑机器人自我调节功能,从而实现静态刺激下的自发持续运动。
作者利用各向异性水凝胶制备了不同绳结结构的拓扑机器人,包括圆环、三叶结、五叶节、所罗门结(Solomon link)、大卫之星结(Star-of-David link),在静态光照下实现了持续的滚动(rolling)、旋转(rotation)等运动。研究了绳结尺寸、手性以及光照强度、方向等因素对拓扑机器人运动机能的影响规律。通过理论模型进一步证实,该自我调节的运动机制源于拓扑结构诱导的预应变、快速可逆的形状变化以及自遮蔽效应的协同作用。此类拓扑机器人可用于执行特定任务,如旋转齿轮、物品输运等。

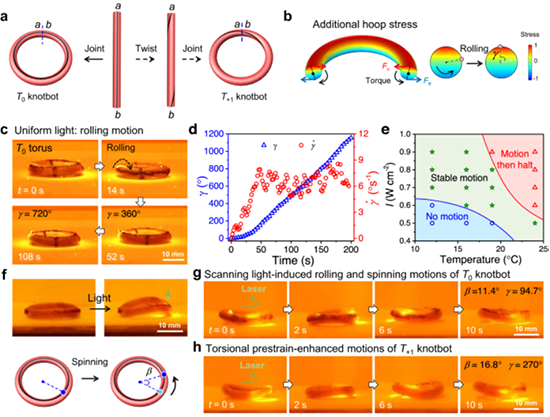
图1.圆环凝胶机器人在静态及动态光照下的连续运动。
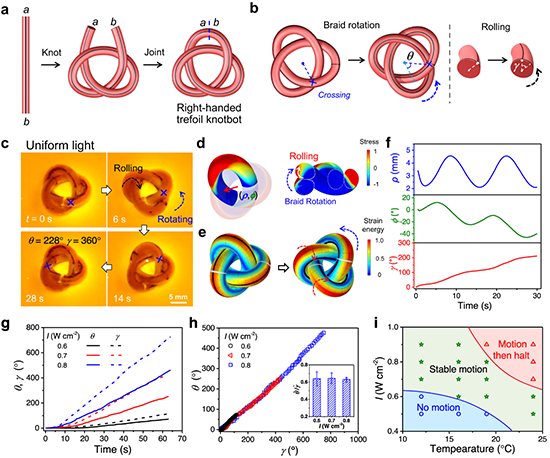
图2. 三叶结拓扑机器人在静态光照下的连续运动。

图3.多种绳结软机器人的自发持续运动。
论文信息:
Qing Li Zhu, Weixuan Liu, Olena Khoruzhenko, Josef Breu, Wei Hong, Qiang Zheng, Zi Liang Wu, Animating hydrogel knotbots with topology-invoked self-regulation, 2024, 14, 300.
https://www.nature.com/articles/s41467-023-44608-x
- 苏科大李琳团队/南邮李炳祥团队 Adv. Mater.:具有多重刺激响应性的形状记忆胆甾相液晶弹性体 2026-05-10
- 南林蔡旭敏/王石发、港中深唐本忠、浙大张鉴予 Chem. Sci.:从天然电子受体到极性/多晶型响应的BioAIE智能防伪材料 2025-12-17
- 苏州大学汪晓巧教授《Nat. Commun.》:仿生蛛丝再突破!湿纺技术制备高性能水凝胶纤维 - 兼具高强韧性与智能响应性 2025-12-03
- 南开刘遵峰/中国药大周湘/天工大王润 AFM:“颈缩”不再只是失稳 - 受蜘蛛丝启发的超强韧水凝胶纤维 2026-06-11
- 长春应化所王大鹏/唐纪琳、长春中医药大学刘芳馨、南京工业大学王瑞Adv. Mater.:水凝胶敷料集成可溶性微针,利用扩散机制达成“时空级联反应”策略实现糖尿病伤口高效促愈 2026-06-09
- 中山大学吴进等 AFM:基于坚韧可降解皮革水凝胶的自供电、超灵敏柔性H2S气体传感器 2026-06-05
- 华南理工孙桃林教授团队 Macromolecules:拓扑结构调控制备高强度仿生水凝胶 2026-04-28
