能够持续输出机械能的自振荡运动在生物体活动中起着至关重要的作用,这启发了人们利用自振荡来设计新型仿生柔性机器人。基于自振荡驱动器的柔性机器人可以模拟爬行、游泳等仿生运动,提高了机器人运动的性能和多样性。然而,当前的自振荡驱动器大多需要精确控制外部刺激能量,如热/湿度梯度、图案化的光照等。设计结构简单、可控的自振荡驱动器,以及在此基础上实现对柔性机器人运动的精确控制仍然是一个挑战。
近日,合肥工业大学胡颖研究员、常龙飞副研究员团队与赵玉顺教授合作,发展了一种静电驱动的石墨烯振荡器,该振荡器能够在直流电压刺激下产生持续振荡运动。受海豹运动启发,进一步设计了一种电/光协同驱动的仿海豹机器人,其中石墨烯振荡器作为仿生后鳍提供推进力,并引入柔性光驱动器作为前鳍来控制运动方向。该机器人能够在电/光刺激下实现携带物体移动、绕开障碍物、定点停车等可控运动。
2025年7月29日,相关成果以“Seal-Bioinspired Electrostatic Oscillation-Based Soft Robot with Light Tunable Locomotion”为题发表在《Advanced Functional Materials》上。
海豹能在陆地也能在水下运动。如图1a所示,在水下运动时,海豹主要依靠摆动后鳍来提供向前的推力,并通过拍打前鳍来改变运动方向。相比之下,海豹在陆地上活动时,主要以胸部和骨盆为接触点,通过自身的背腹起伏向前移动。由于缺乏后鳍连续拍打所提供的巨大动量,海豹在地面上的移动速度相对较慢。受海豹两种运动模式的启发,设计了一种具有可控运动的仿海豹机器人。该机器人包含两个部分(图1b),1)机器人主体由直流电压驱动的石墨烯自振荡器制成,模拟海豹后鳍的连续拍打,为运动提供强大的驱动力。2)机器人两侧安装了两个光驱动器,模拟海豹的前鳍用于调整运动方向。
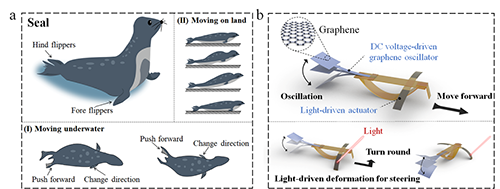
图1 (a) 海豹在水中和陆地上的两种运动模式;(b) 模仿海豹运动的电/光驱动的柔性机器人。
该石墨烯振荡器为悬臂梁结构,放置在两平行板电极之间,一端固定,另一端自由悬挂。直流电源连接在两电极板上以提供稳定的直流电场。在电极之间施加 360 V 的直流电压(电场强度为24 V mm?1),石墨烯薄膜在两电极之间产生了持续的左右弯曲振荡,如图2和视频1所示。其振荡运动的驱动机制归因于静电感应效应,以及荷电极性变化引起的静电力方向变化。振荡运动的频率可通过施加的电压来控制,在100 V mm?1的电场强度下,振荡频率可达10.8 Hz。该石墨烯振荡器还具有出色的机械输出性能,能携带超自身重量9倍的物体(16.8毫克)持续振荡。
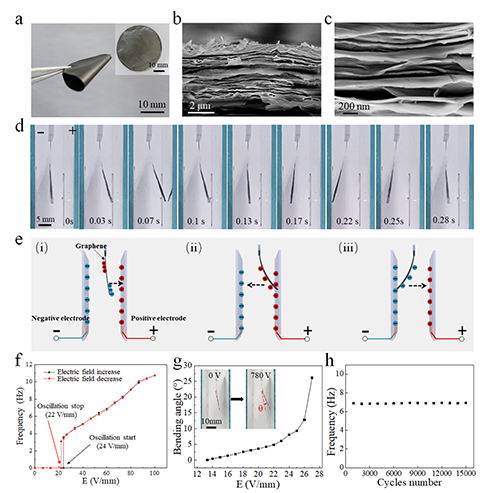
图2 静电驱动的石墨烯振荡器及其性能。
基于石墨烯振荡器在直流电场下持续振荡运动的特性,可以利用它来构建一种新型的电-机械动力系统。通过模仿海豹在水里和陆地上的运动,设计了一种可以在电场下自主移动的仿海豹柔性机器人,如图3所示。该机器人以石墨烯振荡器作为后鳍,聚酰亚胺(PI)薄膜为身体。石墨烯振荡器产生的振荡运动为机器人运动提供了持续的机械动力,半圆形PI身体为机器人的运动提供了支撑点,并有助于减少机器人与地面之间的摩擦。同时,聚酰亚胺的电绝缘性能还可以避免石墨烯振荡器和电极板之间的短路风险。与海豹在水下通过摆动后鳍向前移动类似,当施加电场时,仿海豹机器人可以通过石墨烯振荡器的往复振荡在电极板上实现自主运动。在30秒内,机器人运动了约49毫米的距离。该仿海豹机器人还具有带负载移动的能力。在直流电场的刺激下,可以携带一个约为自重5.2倍(44.6 mg)的物体向前运动。这表明了该机器人在特殊场景中的潜在应用,如在狭窄的带电环境中运输物体、检测等。
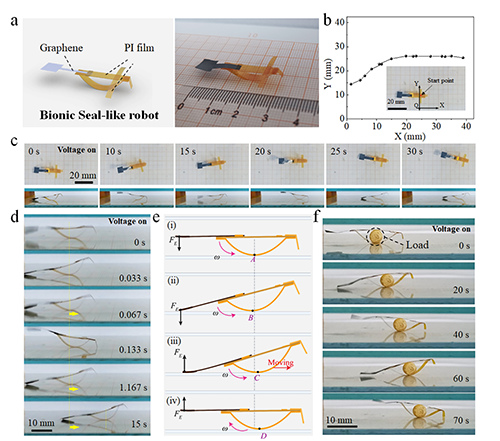
图3 以石墨烯振荡器作为马达的仿海豹机器人在电场驱动下的自主爬行运动,及携带物体向前移动。
通过电场驱动的机械振荡运动,可以初步实现仿海豹机器人的自主运动。然而,仅靠振荡运动很难控制机器人的运动方向。因此,进一步引入能产生可逆变形的柔性驱动器作为仿生前鳍,来控制运动的方向。为了减少仿生前鳍的加入对机器人整体结构和运动的影响,选择了能远程操控的光驱动器来构建机器人的仿生前鳍(图4a)。将光照下产生快速大变形的PE/MXene光驱动器(图4b、c)组装在机器人两侧来控制其运动方向。当施加直流电压后,石墨烯振荡器产生振荡并推动机器人前进。在此过程中,光束照射到光驱动器上,使其变形并接触到下极板,导致移动中的机器人转向。作为验证,展示了仿海豹机器人在电压和光照的双重刺激下,以“S”轨迹绕过两个障碍物(图4d和视频4)。在104s内,该机器人移动了约180 mm,且具有良好的转向性(图4e)。
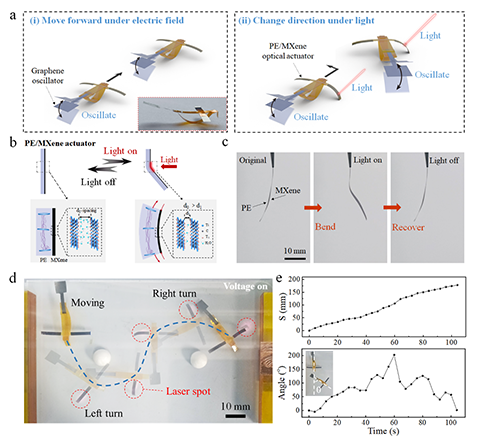
图4 光/电操控的仿海豹机器人及其可控运动。
除了驱动机器人前进外,石墨烯振荡器还可以通过特殊的设计来构建能够连续圆周运动的旋转机器人。石墨烯振荡器在电场的驱动下产生推力,带动机器人顺时针方向旋转。旋转机器人旋转一圈仅需 0.88 秒(图5)。
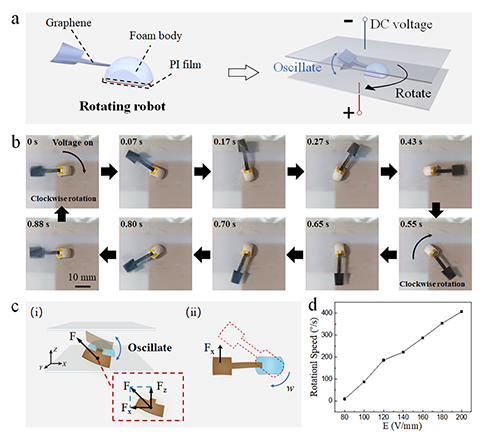
图5. 基于石墨烯振荡器的旋转机器人。
该石墨烯振荡器以及仿生机器人具有结构简易、机械能持续输出、可控性强等优点,有望应用于紧凑型电力设备、气体绝缘输电线路的内部运行和巡检。此外,作为一种机械输出稳定的新型电机,石墨烯振荡器有望通过电极的小型化和柔性化进一步拓展应用范围,在新型智能机械系统和微型软机器人等领域展现出较大的前景。
原文链接:https://doi.org/10.1002/adfm.202512768
- 郑大米皓阳教授、湖南工大经鑫教授 AFM:集成驱动与应变传感功能的梯度水凝胶 - 用于仿生机器人 2025-12-02
- 武汉大学常春雨教授课题组 Nat. Commun.:具有突跳失稳特性的气动水凝胶人工肌肉 2025-04-10
- 科学家研制出三种可磁场控制的仿生机器人 2017-04-14
