华中大丁汉院士、吴志刚教授团队 ACS AMI: 电子竞争合作机理调控得到梯度多孔弹性体
2022-11-02 来源:高分子科技
面对复杂/非结构化的应用场景,软体机器人有必要配备智能化的机械结构,例如具有可编程形态和各向异性实时响应的结构感知一体化本体。多介质得益于其内部丰富的孔隙分布,可以集成承载多种功能单元,有望作为机器人结构感知一体化界面和本体。但是当前多孔介质中,孔的大小多是从纳米级到微米级且孔的分布是随机的,从整体上看是各向同性的,不仅大大降低了与外界交互时的各向异性,而且也难以胜任毫米甚至厘米尺度的软体机器人作业。因此,对于软体机器人常用的弹性体如硅橡胶,亟需开发一种结构与传感一体化的各向异性本体的可控制备手段。

图1 梯度多孔结构机理、性能与应用的概念总览

图2 梯度多孔结构构造过程与电子竞争合作机理
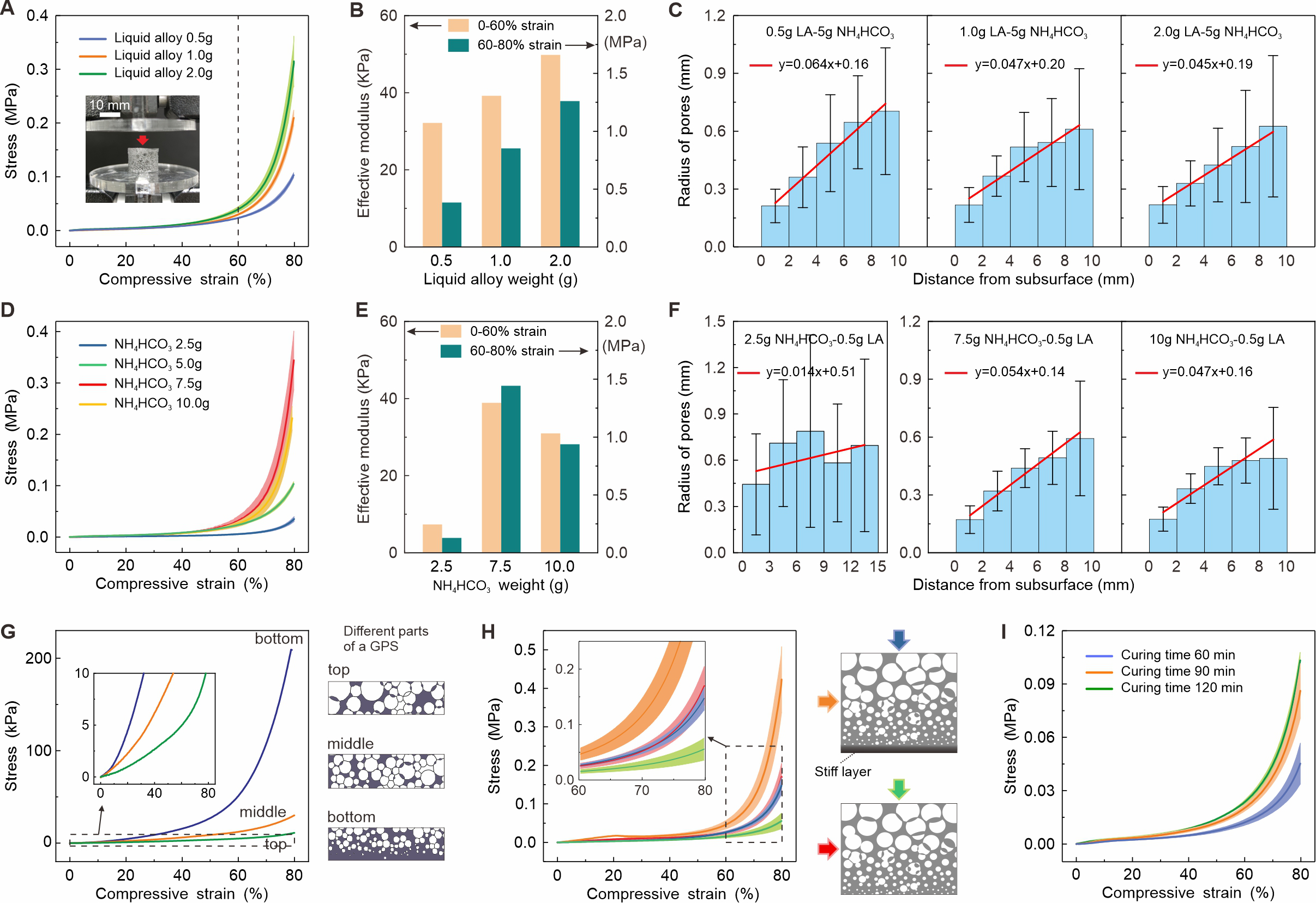
图3 机械性能调控与表征

图4 功能层构造表征与重构

图5 多刚度物体识别的GPS界面

图6 线驱仿生各向异性一体化多孔象鼻子
此工作不仅为软体机器人本体结构传感一体化提供了新的材料与制造思路,而且也拓展了液态金属在催化调控领域的作用。该工作以“Partial Liquid Alloy Microdroplet Sedimentation Induced a Gradient Porous Structured Elastomer with a Tunable Property for an Anisotropic Robotic Bulk”为题被选为封面发表在《ACS Appl. Mater. Interfaces》上。共同第一作者是博士后张硕与博士生宗子盛,通讯作者为博士后张硕与吴志刚教授。该研究得到国家自然科学基金委(52188102 和U1613204)和中国博士后科学基金(2021M701311和BX20220126)的支持。
原文链接:https://pubs.acs.org/doi/10.1021/acsami.2c12384
版权与免责声明:中国聚合物网原创文章。刊物或媒体如需转载,请联系邮箱:info@polymer.cn,并请注明出处。
(责任编辑:xu)
相关新闻
- 东华大学王刚、孙恒达/中科院福建物构所林悦《Adv. Mater.》:液态金属也能绝缘?高性能热界面材料新策略 2026-07-15
- 中科院理化所刘静/北林王磊团队 AM:液态金属“激活”铝电池新未来!Al-LM-Ti复合负极实现39000次超长循环 - 打造高安全柔性固态铝电池 2026-07-15
- 西工大黄维团队官操教授 AM:数字化制备三维液态金属水凝胶 2026-05-28
- Matter:热整流梯度多孔高分子复合材料助力户外自降温热伪装 2026-02-07
- 纳米能源所陈翔宇研究员团队 Nat. Commun.:含水梯度多孔弹性体突破摩擦电传感器线性区间极限 2024-12-10
- 四川大学张兴栋院士团队孙勇/樊渝江《Small》:仿生基质重构3D打印梯度多孔支架再生微环境加速骨再生 2023-02-15
- 中国科大龚兴龙教授课题组《Sci. Adv.》:仿生石蚕蛾幼虫巢穴 - 打造高安全高性能锂金属电池的“刚柔并济”电解质 2026-07-10
