经过亿万年的自然进化,海洋动物们不仅游的快而且省力高效节能。受大自然的启发,研究者们设计了各种水里游动得软体机器人,但是软机器人游动速度相对太慢,接近每秒一个身长,远低于海洋动物的相对速度(每秒一到二十个身长),而且效率偏低。长久以来,实现快速且高效的软机器人一直困扰着软体机器人的研究者们。
近日,美国北卡州立大学的尹杰团队巧妙地利用双稳态结构设计了一款会仿人类蝶泳的低频轻质软体机器人(仅2.8克,驱动频率仅1 Hz),不仅游的快,平均速度每秒可达3.74个身长,瞬时速度可以高达0.45米每秒,而且高效低能耗可与海洋动物媲美。该工作以“Snapping for high-speed and high-efficient, butterfly swimming-like soft flapping-wing robot” 为题近日发表于“Science Advances”杂志上。团队博士生赤银鼎领衔第一作者,其它共同作者包括团队博士生洪尧烨、李艳滨和博士后赵耀。
该蝶泳软体机器人形状像蜜蜂,由一个软体启动驱动器为身体与两翼组成,如图1所示,弯曲且柔软的翅膀是类似于发卡的一种双稳态结构。通过驱动来上下弯曲身体,从而带动两翼的突跳(snapping)快速上下摆动与旋转。通过驱动器的充放气使得翅膀在往上和往下弯曲的状态来回切换。切换的过程是通过突跳实现的,突跳可以把积累的能量迅速释放,使得软体机器人瞬间获得很大的游速。于此同时,输入整个系统的能量反而很低,因此使得软体机器人同时具备快速和高效两种优势。
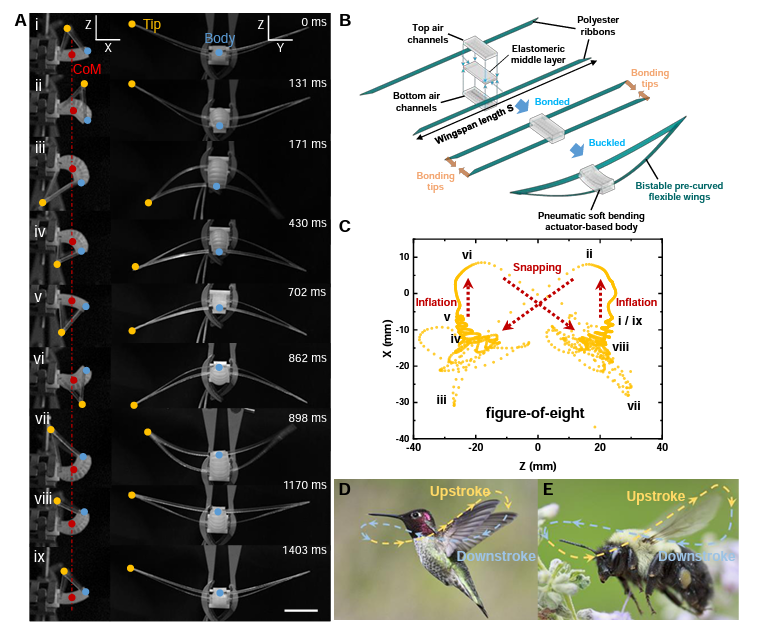
图1 蝶泳机器人驱动器的设计
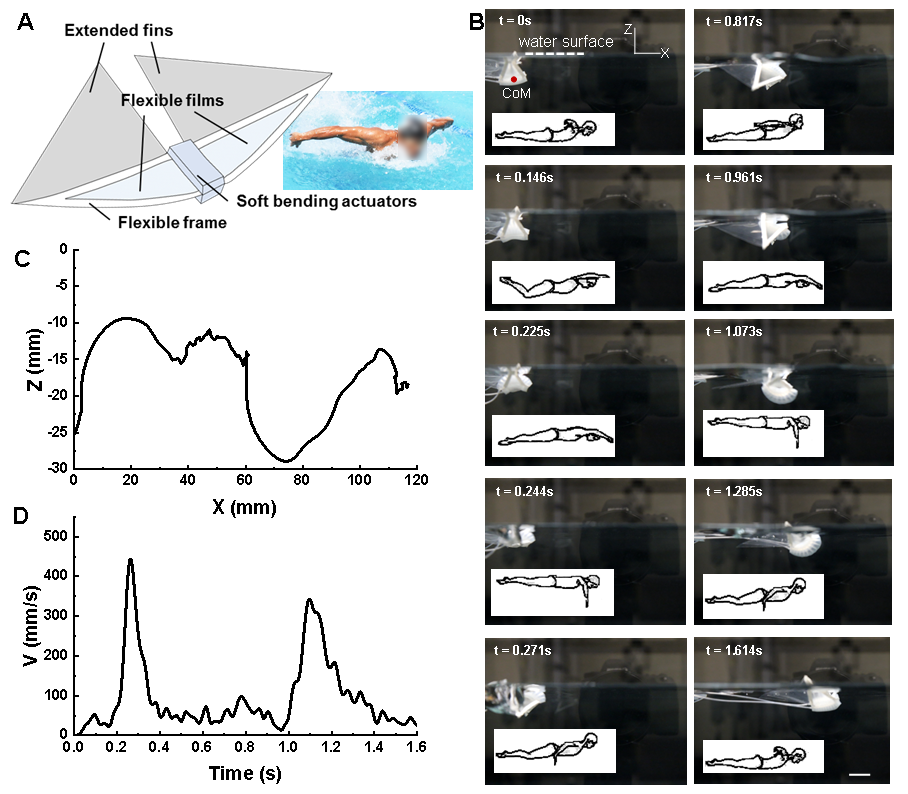
图2 蝶泳软机器人性能与姿态

研究者们认为这种软体机器人的设计也可以通过其他驱动方式进行驱动,也可以根据应用适当的调整大小,从而适应各种工作环境。
原文链接:https://www.science.org/doi/10.1126/sciadv.add3788
团队介绍
尹杰团队(https://jieyin.wordpress.ncsu.edu/)目前致力于力学、材料以及结构在软体机器人、机械超材料、以及多功能形变节能材料上的基础以及应用研究。近期代表性原创成果包括:
软机器人:
快速高效蝶泳软机器人 (Chi et al., Sci. Adv., 8, eadd3788, 2022)
自主智能软机器人 (Zhao et al., PNAS, 119, e2200265119, 2022; Zhao et al., Adv. Mater. 202207372, 2022)
无损伤剪纸机械手 (Hong et al., Nat. Commun. 13, 530, 2022)
快跑软机器人 (Tang et al., Sci. Adv., 6, eaaz6912, 2020)
水陆两栖攀爬软机器人 (Tang et al., Soft Robot., 5, 592, 2018)
功能性剪纸:
三维立体模块剪纸与剪纸超材料 (Li et al., Adv. Funct. Mater., 2105461, 2021; Li et al., Mater. Today Phys., 100511, 2021)
活性剪纸与剪纸智能窗 (Tang et al., PNAS, 116, 26407, 2019; Tang et al., Adv. Mater., 29, 1604262, 2017)
- 中国科大龚兴龙教授课题组《Sci. Adv.》:仿生石蚕蛾幼虫巢穴 - 打造高安全高性能锂金属电池的“刚柔并济”电解质 2026-07-10
- 北航罗斯达教授 Sci. Adv.:激光编程软执行器-解锁仿生软体机器人变形定制新方法 2026-07-04
- 陕科大强涛涛、任龙芳教授团队 AFM:具有应变传感和溶剂触发报警的双模态仿生自修复聚氨酯基离子凝胶传感器 2026-06-22
- UCLA贺曦敏团队 Sci. Adv. 封面:球形无系留自维持滚动机器人 2026-05-01
- 哈工大(深圳)朱时裴教授课题组诚招硕士、博士、博士后 - 材料、化学、物理、机械、生物工程 2025-09-17
- 深圳大学黄龙彪教授团队 《Adv. Sci.》综述:生物可降解材料在软体机器人与柔性电子领域的研究进展 2025-09-10
