苏黎世联邦理工学院顾红日博士等《Nat. Commun.》:磁性软体机器人链可自折叠成复杂稳态结构
2023-03-12 来源:高分子科技
随着微创手术的普及,普通患者的痛苦得到大大减轻,术后恢复也更快。然而,微创手术器械的尺寸限制也导致手术难度加大,特别是在狭窄、复杂的内部环境中操作时。而利用软体机器人技术可以有效地解决这个问题,特别是利用磁性驱动机器人,可以实现精确的导航、立体成像和精细操作,已成为微创手术领域的热门技术。
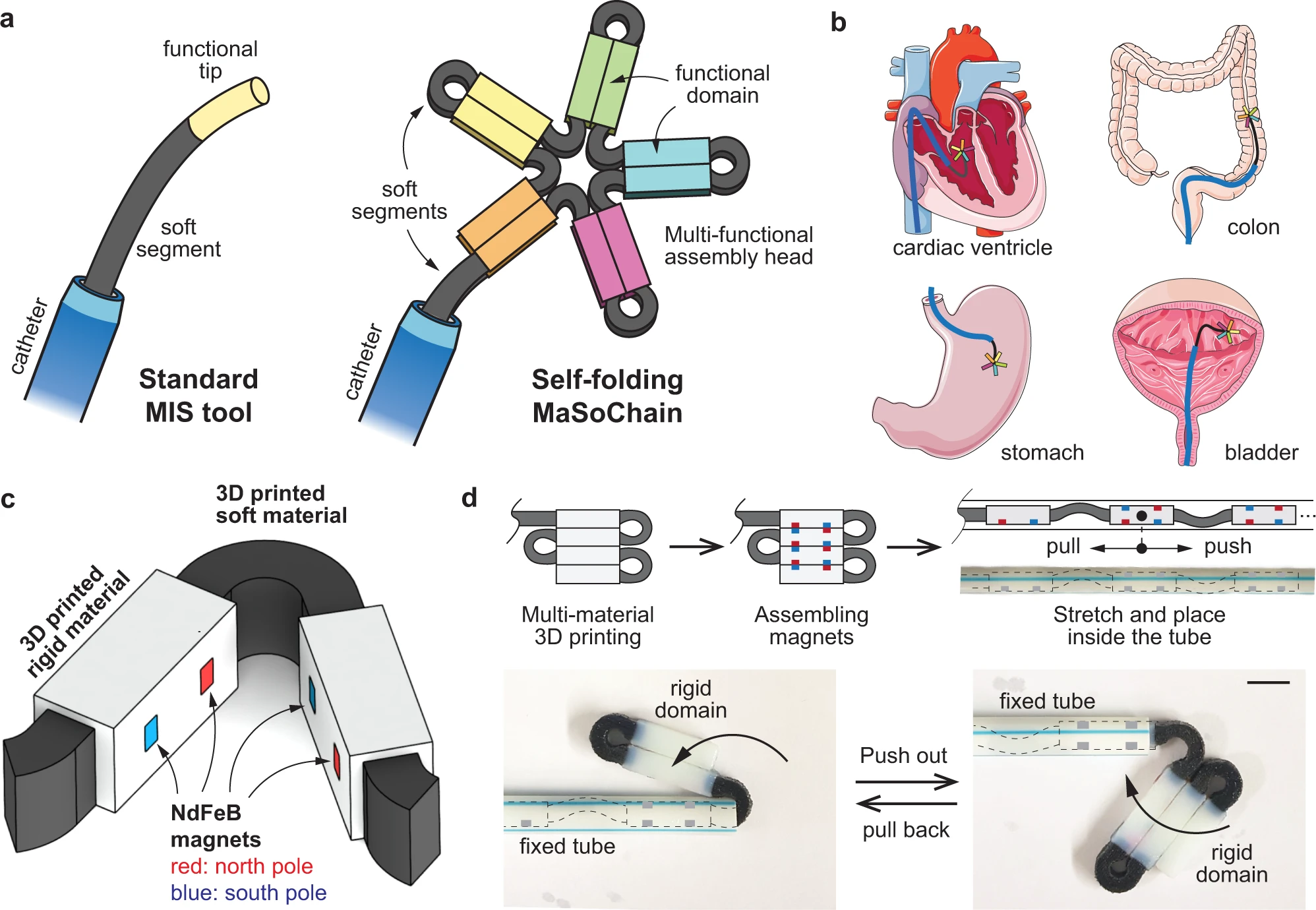
图一:磁性软体机器人链(MaSoChains)的概念、结构和工作机制。
然而,由于导管鞘的内径和人体创口的尺寸限制,微创手术器械的大小和功能都受到了局限,难以进一步优化。为了解决这个问题,瑞士苏黎世联邦理工学院(ETH Zurich)的研究人员开发了一种新型的自折叠软机器人链,称之为MaSoChains。该技术通过利用自身的弹性和磁性,可以自动折叠成稳定的结构,并可以根据需要进行自由组合,实现不同的形态和功能。这种磁性软体机器人可以与最先进的磁性导航设备兼容,并提供许多难以通过现有外科手术工具实现的理想特征和功能。该工作以“Self-folding soft-robotic chains with reconfigurable shapes and functionalities”为题发表在《Nature Communications》上(Nat Commun 14, 1263 (2023))。
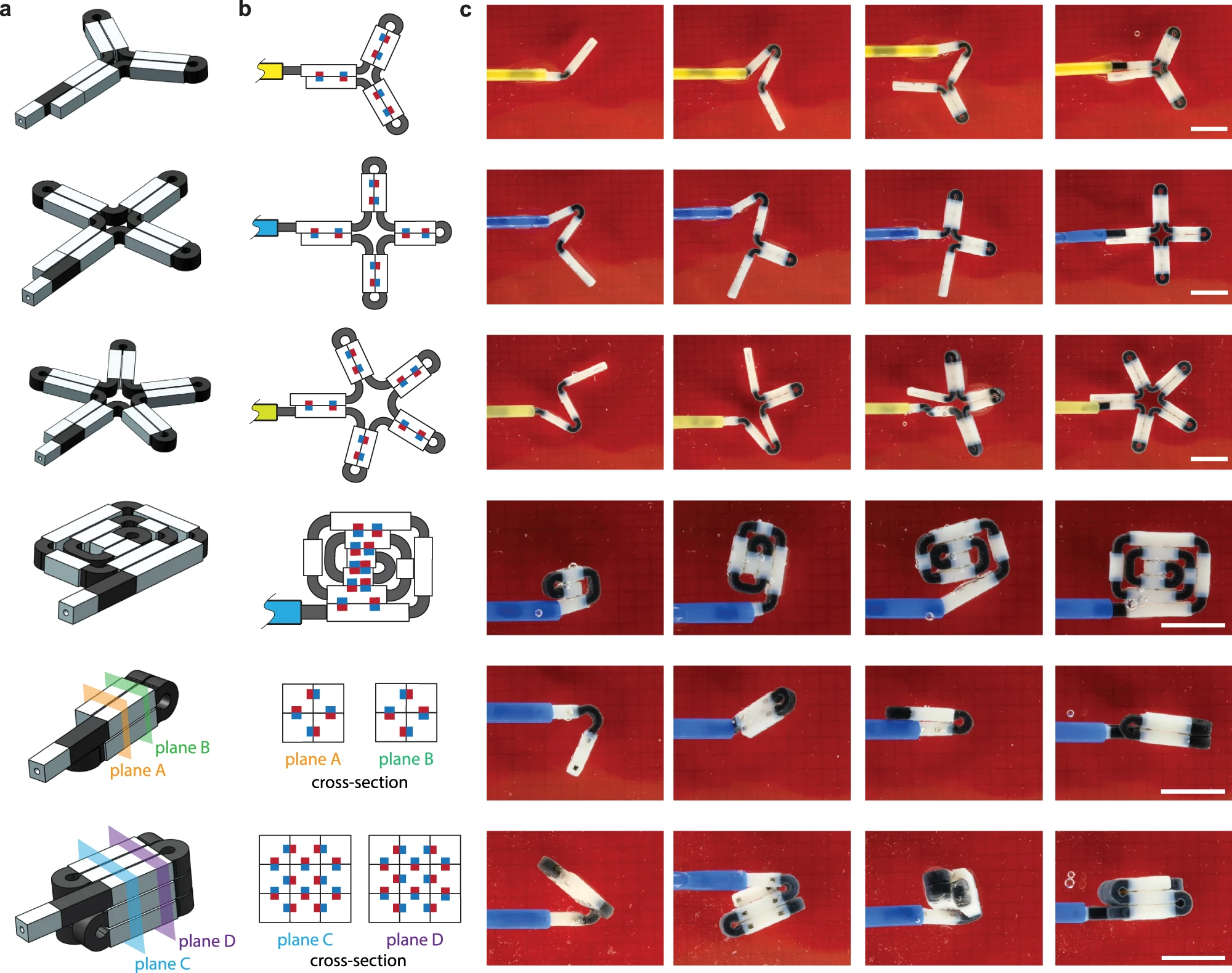
图二:复杂的二维和三维几何结构的动态折叠过程。

图三:集成了柔性印刷电路板的MaSoChain
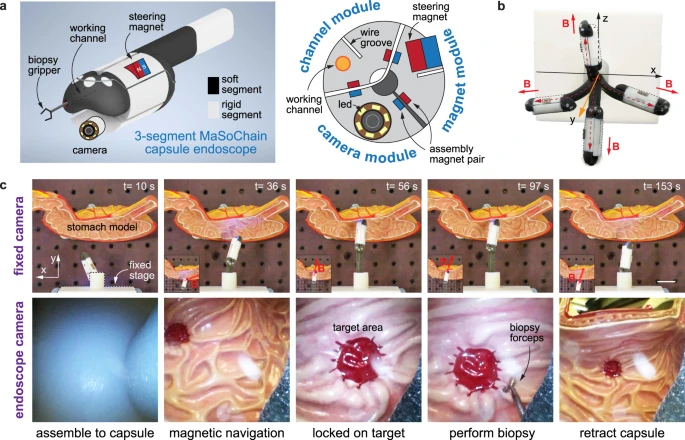
图四:基于三段折叠的MaSoChain胶囊内窥镜。
原文链接:https://www.nature.com/articles/s41467-023-36819-z
版权与免责声明:中国聚合物网原创文章。刊物或媒体如需转载,请联系邮箱:info@polymer.cn,并请注明出处。
(责任编辑:xu)
相关新闻
- 清华大学许华平课题组 Matter:可用于多种基材的模块化形状编程方法 2024-01-19
- 自折叠功能使 2D 材料创造 3D 形状 2017-06-01
- 4D打印技术制造出复杂的自折叠结构物 2015-10-20
- 哈工大(深圳)马星/金东东团队 Nat. Commun.:通过反应润湿制备用于小尺度软体机器人的液态金属/四氧化三铁磁性复合材料 2023-10-09
- 电子科技大学及南洋理工大学团队《Adv. Mater.》:3D打印磁性软体机器人实现液滴的灵活操纵及体外诊断 2022-02-18
- 西安交大唐敬达与华中科大邓谦合作: 3D打印水凝胶制作的磁性软体机器人 2021-10-29
