哈工大(深圳)马星/金东东团队 Nat. Commun.:通过反应润湿制备用于小尺度软体机器人的液态金属/四氧化三铁磁性复合材料
2023-10-09 来源:高分子科技
相比刚性机器人,软体机器人能够实现更高自由度的变形,且在碰撞时更好地吸收能量,从而有效弥补机器与人之间机械性质的差异,提高应用中的安全性。若进一步赋予软体机器人以磁性并缩小至小尺度(毫米尺度及以下)后,则可以在磁场操控下实现人体环境中软体机器人的远程精确控制。此类磁性微型软体机器人有望进入人体中常规医疗手段难以触及的狭窄区域中执行任务,从而在生物医学领域展现出巨大的应用价值 [Chem. Rev. 2022, 122, 5317; Nat. Rev. Mater. 2018, 3, 74]。
液态金属磁性软体机器人因其独特的不混溶性、可变形性和金属属性而受到广泛关注。为了构建该新型的磁性软体机器人,研究人员使用了不同磁性金属粉末(Fe、Ni、NdFeB和Gd等)与液态金属(镓和共晶镓铟合金等)进行复合。然而,这些过程往往依赖于金属粉末与液态金属间的合金化作用或液态金属氧化膜黏附作用,制备得到的磁性液态金属复合材料存在磁性随时间衰退和金属粉末泄漏等潜在风险。而如果使用磁性强、惰性且生物相容性好的四氧化三铁(Fe3O4)磁性材料,则会由于其与液态金属间巨大的表面能失配问题而展现出高度的不润湿性,从而无法实现液态金属与磁性材料的高效复合。
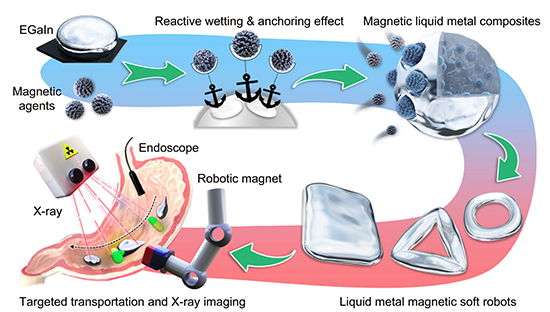
图1. 利用反应润湿锚定效应制备液态金属磁性微型软体机器人。

图2. 液态金属与改性Fe3O4磁性颗粒的复合效果。
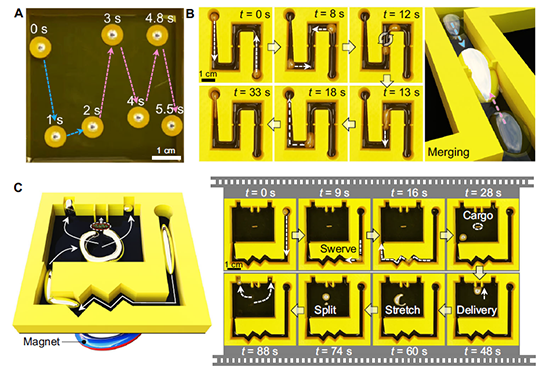
图3. 液态金属磁性软体机器人在磁场控制下实现按需操纵。
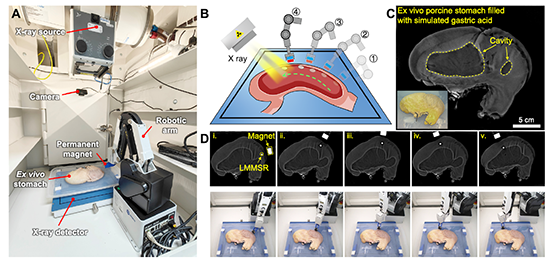
图4. X射线成像引导下的液态金属磁性软体机器人在离体猪胃中磁控导航。
原文链接:https://www.nature.com/articles/s41467-023-41920-4
版权与免责声明:中国聚合物网原创文章。刊物或媒体如需转载,请联系邮箱:info@polymer.cn,并请注明出处。
(责任编辑:xu)
相关新闻
- 东北大学田野团队 AFM:液态金属基共晶水凝胶应变传感器实现超低滞后的人机交互与高精度手语识别 2026-07-27
- 东华大学王刚、孙恒达/中科院福建物构所林悦《Adv. Mater.》:液态金属也能绝缘?高性能热界面材料新策略 2026-07-15
- 中科院理化所刘静/北林王磊团队 AM:液态金属“激活”铝电池新未来!Al-LM-Ti复合负极实现39000次超长循环 - 打造高安全柔性固态铝电池 2026-07-15
- 苏黎世联邦理工学院顾红日博士等《Nat. Commun.》:磁性软体机器人链可自折叠成复杂稳态结构 2023-03-12
- 电子科技大学及南洋理工大学团队《Adv. Mater.》:3D打印磁性软体机器人实现液滴的灵活操纵及体外诊断 2022-02-18
- 西安交大唐敬达与华中科大邓谦合作: 3D打印水凝胶制作的磁性软体机器人 2021-10-29
