加州理工学院高伟教授团队 Adv. Mater.综述: 多模态软体机器人驱动与运动
2024-02-07 来源:高分子科技
在不同尺度下的生物中可以观察到多样化且有适应性的复杂运动模式。由于刚性材料的诸多限制,在传统机器人中实现灵巧运动可能很困难。基于软材料的机器人本质上具有可变形、柔顺、适应性强和可调节的特点,使得软体机器人有利于实现复杂的驱动和运动步态。
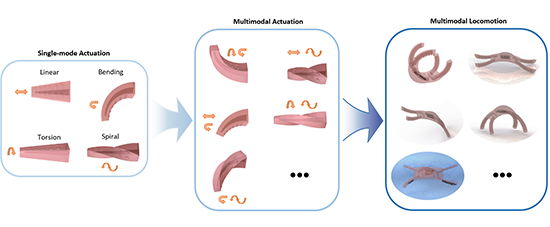
图1 由单模态驱动到多模态运动概述
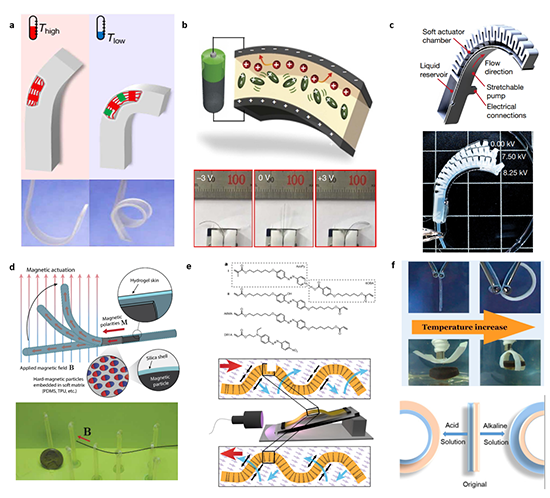
图2 用于软驱动器的各种软材料
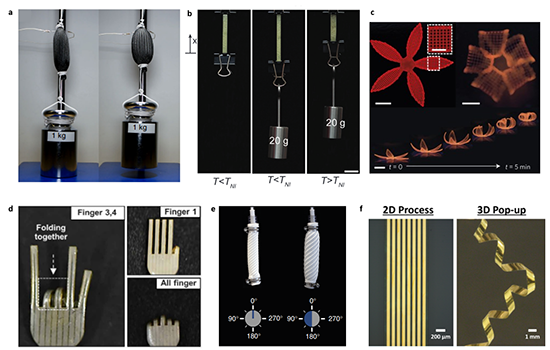
图3 软驱动器的各种运动
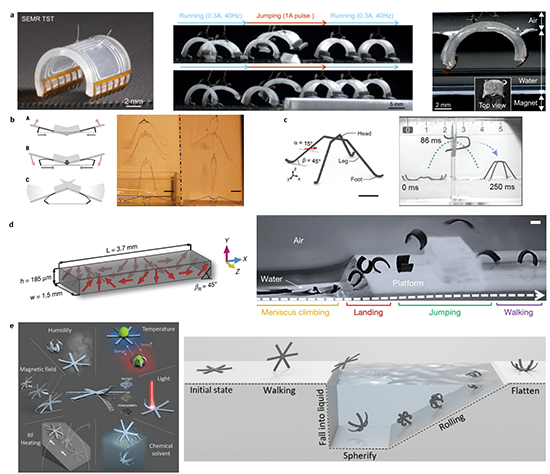
图4 软体机器人跨环境的多模态运动
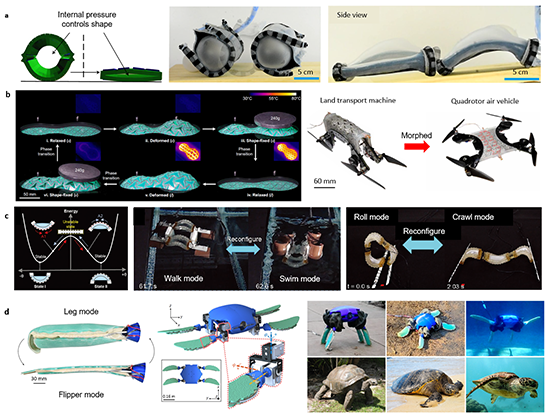
图5 软体机器人可重构变形引入的多模态运动
多模态的软体机器人在适应不同地形和环境、提高步态的敏捷性、可控导航、改变形态以及整体多功能性方面具有优势。除了上述例子,还有更多运动模式组合未被探究。未来的发展方向还包括更多驱动器在一个系统中的组合和集成,正如肌肉是如何调控生物体运动一般。另外,将软驱动器应用于传统机器人的方法实现了增强的性能。除了软体机器人,多模态软驱动器也可用于操控器、生物电子器件等。因此,通过组合结构设计和多刺激响应材料,设计用于复合驱动与运动的多模态驱动器,将会是未来软体机器人领域的发展重点之一。
该综述第一作者为加州理工学院博士生Dickson R. Yao,通讯作者为加州理工学院医学工程系助理教授高伟。
课题组网址:https://www.gao.caltech.edu/
论文题目:Multimodal Soft Robotic Actuation and Locomotion
原文链接:https://doi.org/10.1002/adma.202308829
版权与免责声明:中国聚合物网原创文章。刊物或媒体如需转载,请联系邮箱:info@polymer.cn,并请注明出处。
(责任编辑:xu)
相关新闻
- 南京大学徐飞教授/王漱明教授 Nat. Commun.:光纤-Meta集成 - 基于Janus超构光纤的多模态内窥 2026-06-21
- 苏大张晓宏教授团队招聘博士后 - 人形机器人电子皮肤与多模态触觉感知方向 2026-06-17
- 苏州大学张晓宏教授课题组招聘柔性电子器件方向博士后 2026-05-06
- UCLA贺曦敏团队 Sci. Adv. 封面:球形无系留自维持滚动机器人 2026-05-01
- 哈工大(深圳)朱时裴教授课题组诚招硕士、博士、博士后 - 材料、化学、物理、机械、生物工程 2025-09-17
- 深圳大学黄龙彪教授团队 《Adv. Sci.》综述:生物可降解材料在软体机器人与柔性电子领域的研究进展 2025-09-10
