可控形变材料在软体机器人、软材料和仿生制造等多种应用中被日益关注。大自然为设计形变材料提供了丰富的灵感,例如,松塔、种荚和小麦会因环境湿度变化而弯曲和扭曲,这种变化源于外部刺激下的内部非均匀应力,如异质膨胀/收缩。受这些自然形变系统的启发,各种非均质结构,包括双层结构、梯度结构、图案化结构已被应用于形变材料。在这些策略中,图案化结构因其可调节内部应力分布在实现复杂三维结构方面尤为有效。面内异质性为控制图案化异质结构凝胶中的组分分布提供了一种机制。这种受控的异质性可以实现可编程的内部应力分布,进而在外部刺激下实现可控的三维构型。
目前许多的研究工作利用周期性条纹、圆形或其他多边形形状的平面凝胶片实现了三维形状转变。然而,对平面凝胶片卷曲方向的控制关注较少。一般来说,凝胶在外部刺激下会经历各向同性的膨胀/收缩,因此卷曲变形可以发生在任何方向。这导致卷曲方向不可预测,纵向、横向和对角卷曲都可能发生。图案化结构可以通过改变图案形状来调节应力分布。尽管如此,大多数形状转变是由图案面内或面外不匹配导致的。在图案化结构的凝胶片中,实现可预测的卷曲方向和可编程的形状转变仍然被研究的较少。
中国科学院理化技术研究所仿生智能界面科学中心王树涛研究员、张飞龙研究员团队受松塔鳞片吸湿异质结构启发,将松塔鳞片中“弹簧/方形”微管结构转化为平面正弦图案,通过浸润诱导三维界面聚合(WET-DIP)策略构建了一种正弦图案化水凝胶-半包埋-油凝胶(HSEO)片,实现了复杂三维结构的可编程制备。通过界面拉伸应力和内部压力的共同作用,可以实现曲率可控的纵轴和横轴弯曲。通过调节正弦图案参数和油凝胶基质的约束作用,可以得到不同的三维复杂结构。
该研究成果以“Bioinspired Programmable Biaxial Rolling Gel Sheets for Complex 3D Morphing”为题,发表在Advanced Materials上(Adv. Mater. 2026, DOI: 10.1002/adma.202519226)。中科院理化所博士生蔡胤民和北京理工大学王长显副教授为该论文的第一作者,通讯作者为中科院理化所张飞龙研究员和王树涛研究员。
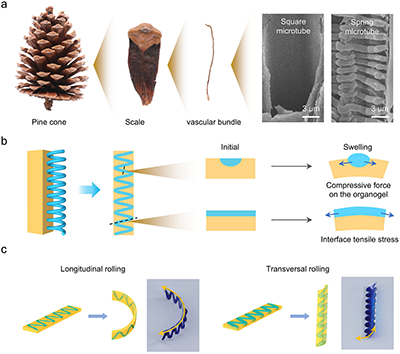
图1. 受松塔启发的正弦图案化HSEO片的仿生设计概念
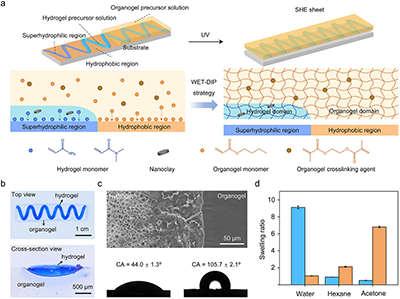
图2. 正弦图案化HSEO片的制备与表征
正弦图案化结构不仅通过油/水凝胶界面拉伸应力调控形变方向,还通过半包埋的水凝胶对油凝胶基质的压应力调控内部应力分布,实现了纵轴弯曲与横轴弯曲曲率的可编程调控。研究团队系统探究了正弦图案参数(如波长λ、线宽w、水凝胶厚度、油凝胶基质的约束)对凝胶片形变行为的影响。通过精确调控波长、线宽、水凝胶厚度和油凝胶的约束,可以实现可编程的双轴曲率控制,从而实现复杂的三维变形结构的构筑。在曲率控制的指导下,通过调整正弦图案参数,可实现HSEO片从二维平面片材到三维复杂结构(如船形、碗形、花瓣形等)的可控转变。
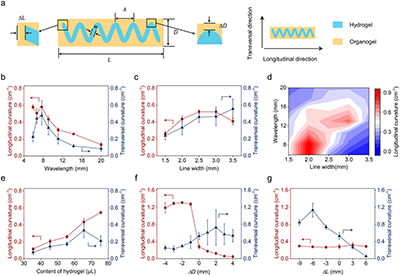
图3. 不同正弦参数对正弦图案化HSEO片形状转变的影响
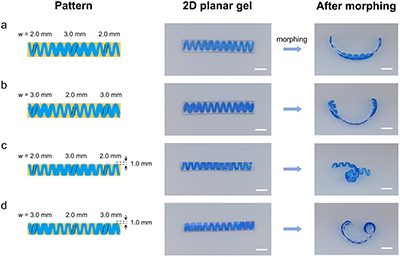
图4. 由正弦图案调控的正弦图案化HSEO片的可编程形状转变
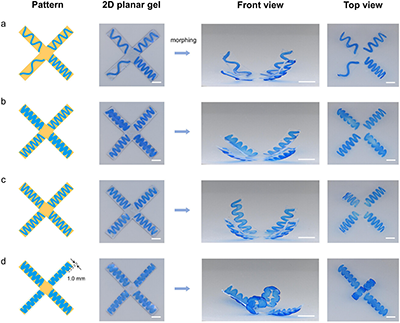
图5. 由正弦图案调控的正弦图案化HSEO片的可编程复杂3D形状变形
此外,半包埋结构展现出与传统外凸结构相反的形变行为。通过有限元分析条纹图案凝胶片的形变形为,并揭示其内部应力分布与形变机制。在半包埋结构中,垂直于条纹的界面应力大于沿条纹的拉伸应力。垂直于条纹的界面拉伸应力主要由水凝胶内部膨胀引起的内部压力驱动,从而对周围油凝胶产生压缩力。水凝胶条对周围油凝胶的压缩力是弯曲的主要驱动力,油凝胶中的界面拉伸应力主要调节弯曲方向。
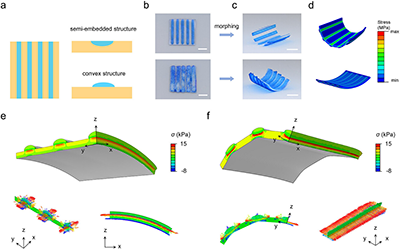
图6. 半包埋式结构与外凸结构异质凝胶片之间的形变比较
该研究不仅提出了一种新型的可编程三维形变机制,也为软材料从二维图案化片向三维结构的可控转变提供了新的仿生策略。所开发的凝胶材料在软体驱动器、自适应器件和生物医学工程等领域具有广阔的应用前景。
该工作得到了国家自然科学基金(22575259、22521103)、中国科学院战略性先导科技专项(XDB1030402)和北京市高等学校卓越青年科学家计划(JWZQ20240102014)等项目的支持。
近年来,中国科学院理化技术研究所王树涛研究员、张飞龙研究员团队在仿生智能形变材料和驱动器领域取得了系列重要突破。例如,团队提出新型界面聚合方法制备水凝胶/油凝胶Janus聚合物膜驱动器,实现性质差异大的材料的高强度结合(NPG Asia Mater. 2017, 9, e380)。在此基础上,团队开发了一种浸润诱导三维界面聚合(WET-DIP)策略,制备了宏观的油凝胶包水凝胶材料(Small 2023, 19, 2208157)。2022年,团队重新审视松塔的吸湿运动,揭示了松塔湿度响应的超慢运动的奥秘和维管束运动的机制,并受此启发研发了具有类松塔湿度响应的超慢运动的人工驱动装置(Nat. Mater. 2022, 21, 1357-1365)。随后,团队进一步总结了植物组织控制形变速度的机制和策略,包括从超快到超慢的调控,并提出了一些仿生学的策略,用于制造速度可控的仿生机器人(Nano Res. 2023, 17, 570-586)。另外,受生活中撕胶带过程启发,团队提出一种基于剥离诱导非对称塑性应变的可控形状转变策略,适用于聚合物、金属、纤维膜等具有塑性特征的材料,为柔性电子的2D向3D转变提供了新方法(Nat. Commun. 2022, 13, 7294)。考虑到连续性响应驱动在实际应用中重要性,该团队系统总结并定义了四种在恒定环境中实现连续性响应驱动的策略,并深入探讨了这四种策略的基本原理、适用范围、优缺点、应用及挑战等(Adv. Mater. 2025, 37, 2502926)。
原文链接:https://advanced.onlinelibrary.wiley.com/doi/10.1002/adma.202519226
课题组网站:https://www.x-mol.com/groups/Zhang_Feilong
- 中科院深圳先进院杜学敏副研究员团队研发出仿变色龙软体驱动器 2019-08-02
- 中科院深圳先进院杜学敏研究团队实现Na+/Ca2+触发传统水凝胶可控三维形变 2019-01-21
- 中国科大龚兴龙教授课题组《Sci. Adv.》:仿生石蚕蛾幼虫巢穴 - 打造高安全高性能锂金属电池的“刚柔并济”电解质 2026-07-10
- 北航罗斯达教授 Sci. Adv.:激光编程软执行器-解锁仿生软体机器人变形定制新方法 2026-07-04
- 陕科大强涛涛、任龙芳教授团队 AFM:具有应变传感和溶剂触发报警的双模态仿生自修复聚氨酯基离子凝胶传感器 2026-06-22
