相对于传统的机器人,软体机器人由于具有极大的自由度和变形能力,在生产生活、医疗救援、航空航天和军事等领域具有巨大的应用潜力。若软体机器人尺寸降至厘米及以下,可以在狭小空间内(如废墟狭缝、生物体内)完成各种复杂作业。小尺寸软体机器人一般可以简单分为两部分:致动部分(身体),用于驱动机器人运动;与基底接触的部分(足部),决定了机器人的运动能力。目前,人们对软体机器人致动器进行了广泛而深入的研究,而对机器人的足部设计却很少,很多小型软体机器人甚至缺乏足部设计,只是致动器的外沿与基底接触。缺乏良好的足部设计,机器人往往需要粗糙或具有特殊结构的基底表面来提供前进运动的反作用力,机器人运动的精确控制也会受到限制。
众所周知,壁虎可以在几乎所有的表面上运动,包括垂直的墙壁甚至是天花板等,其脚上的多级刚毛结构扮演了关键角色:微纳米刚毛结构允许壁虎脚与各种表面间形成足够大黏附力;而刚毛末端的抹刀形结构可以产生具有方向性的摩擦力,方便壁虎脚进行快速地黏附/脱附切换,从而快速移动。另一方面,尺蠖的运动行为使得它可以保持前足或后足固定在接触表面,保证它可以在小树枝等表面自由行动。受到壁虎刚毛结构和尺蠖运动步态的启发,武汉大学薛龙建教授课题组(NISE-Lab)设计制备出一种新型有足软体机器人Geca-Robot(图1)。这种机器人结构简单,由“足”和“身体”两个部分组成。机器人足部为仿壁虎刚毛结构的三角形柱状阵列,可响应身体变化提供驱动力,并可提供各向异性的可逆摩擦力来控制运动。其身体(肌肉)部分由透明带状的PDMS和带状的石墨烯/PDMS复合材料(GP)交替排列组成。利用GP中石墨烯的光热效应,引起身体热膨胀/收缩为Geca-Robot提供驱动。从紫外到红外的全波段光都可以驱动Geca-Robot进行定向运动。
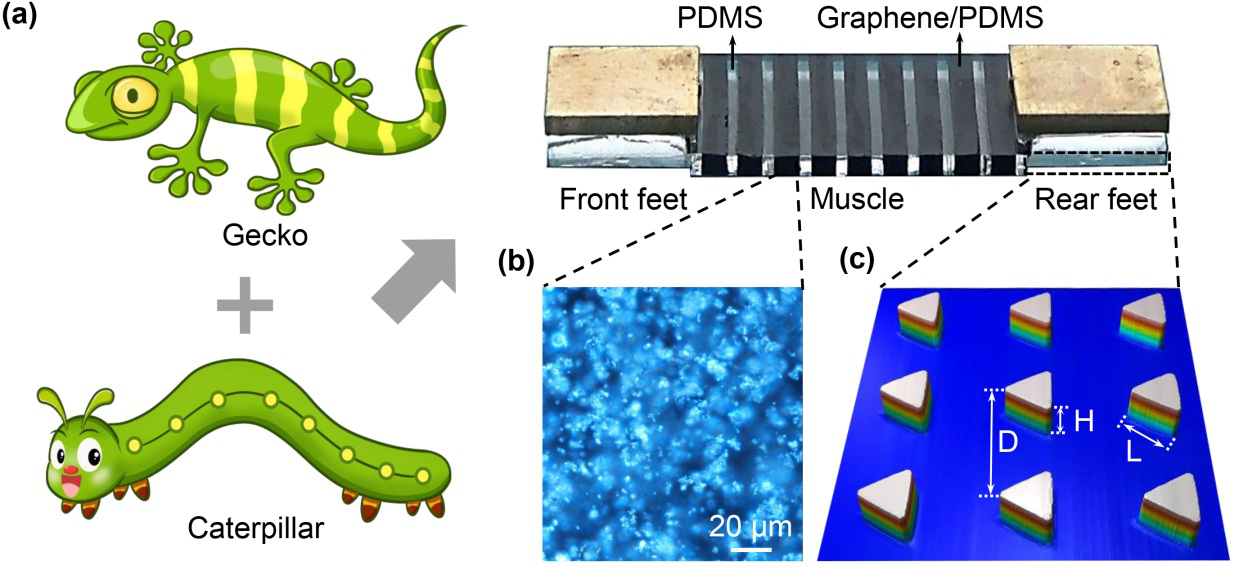
图1. (a)受壁虎和尺蠖启发的Geca-Robot及其(b)肌肉部分石墨烯/PDMS复合材料(GP)暗场光学照片和(c)足部三角形柱状阵列三维图。
Geca-Robot的运动机理为:前后足表面的三角形柱状阵列具有相同的取向,三角形阵列的角指向机器人的前进方向。当足部的三角形柱状阵列在受到不同剪切方向作用力时,沿三角形边方向的摩擦力(fE)总是大于沿角方向(fA)的摩擦力,且始终方向相反。当Geca-Robot处于待命模式时,前后足均与基底保持接触(图2a)。光照时,Geca-Robot肌肉部分发生膨胀,前后足均受到膨胀作用力F+;但前足受到的F+作用力向前,后足受到的F+作用力向后(图2b)。当F+随着光照时间的增长逐渐增大至足以克服前足摩擦力fA时,前足开始向前滑动。此时,F+不再继续增加,始终与fA持平。另一方面,由于F+始终不足以克服后足向后运动所需摩擦力fE,后足上的柱状阵列仅在原地发生轻微弯曲变形,但保持锚定状态。当光照停止时,Geca-Robot肌肉收缩,收缩作用力F-与F+方向相反,从而导致前后足所受摩擦力反向,此时前足滑动需克服摩擦力fE而后足需克服fA。所以,当F-增加至fA时,后足优先开始向前移动,收缩作用力不再增加,前足保持锚定状态(图2c)。通过光照的开/关循环,驱动Geca-Robot以尺蠖运动步态向前运动。Geca-Robot运动过程稳定性高,并可以通过调控辐照波长、强度和关照开关周期来进行精确控制。

图2. Geca-Robot不同状态的运动步态:(a)stand-by、(b)light-on和(c)light-off阶段前足(左侧)和后足(右侧)状态。当足与基底保持接触时三角形柱子显示深灰色,发生滑动时显示为浅灰色,锚定状态表现为三角形柱子发生弯曲变形。
由于结合了仿壁虎刚毛的足部结构,Geca-Robot表现出优秀的全地形运动能力(图3):在光滑/粗糙表面、干燥/湿润表面均可以进行稳定运动;在倾角高达30°的光滑表面上,仍可以稳定运动而不会发生滑移;可以在100 °C至-17 °C范围内的表面上运动,表现出对具有大温度范围或极端温度变化环境的良好适应性。此外,Geca-Robot还具有优秀的负载能力,可以负载超过其自重50倍的重物稳定运动。

图3. Geca-Robot(a)在具有不同粗糙度的干燥表面的运动位移。插图为不同粗糙度表面的3D形貌图。红点代表Geca-Robot在光滑玻璃表面的运动位移;(b)在Ra粗糙度为4.1μm的有水表面不同时间点的运动过程图;(c)在上下坡过程不同坡度条件下的运动位移,插图为上坡过程中的Geca-Robot;(d)在100 °C、 -17 °C和室温条件下不同运动周期的位移;(e)在不同负载时的运动位移,插图为Geca-Robot负载50倍自身重量的重物;(f)负载3.8 g重物在被水滴覆盖的粗糙金属基底表面的上坡过程截图。
Geca-Robot的足部设计是其拥有全地形运动能力的关键,为今后小尺寸软体机器人的研发提供了新思路。这种足部和驱动设计使得其可在平面内发生形变,赋予Geca-Robot在狭窄封闭环境作业的能力;而其可以被红外驱动的特性,使得其在医疗和工业应用领域拥有巨大应用潜力。
该成果发表在材料领域顶尖期刊Materials Today(IF为24.372)上,并被选为内封面文章。论文的第一作者为武汉大学动力与机械学院博士生汪鑫,通讯作者为刘胜教授和薛龙建教授。该研究得到国家重点研发计划项目和国家自然科学基金的支持。
NISE-Lab长期致力于仿生黏附材料的相关研究,相关成果还有Small, 2019, 1904248、ACS Appl. Mater. Interfaces,2019, 11, 46337、ACS Nano, 2017, 11, 9711、Adv. Funct. Mater. 2015, 25, 1499、Nat. Commun. 2015, 6, 6621、Nano Lett., 2013, 13, 5541等国际顶尖期刊以及书籍《Bio-Inspired Structured Adhesives》(Springer, 2017)。
相关论文链接:https://doi.org/10.1016/j.mattod.2019.12.028
NISE-Lab 课题组网站:http://niselab.whu.edu.cn/
- 北航罗斯达教授 Sci. Adv.:激光编程软执行器-解锁仿生软体机器人变形定制新方法 2026-07-04
- UCLA贺曦敏团队 Sci. Adv. 封面:球形无系留自维持滚动机器人 2026-05-01
- 哈工大(深圳)朱时裴教授课题组诚招硕士、博士、博士后 - 材料、化学、物理、机械、生物工程 2025-09-17
- 武汉理工大学何大平、刘波/西湖大学黄嘉兴 Nat. Commun.:破解界面相互作用困境 - 实现日常织物保形石墨烯涂层宏量制备 2026-05-21
- 天津大学封伟团队 AFM:氧化石墨烯-熔盐复合材料突破高温光热相变储能瓶颈 2026-04-20
- 化学所刘国明、巴斯克大学Alejandro J. Muller、都灵理工大学Alberto Fina《Macromolecules》:石墨烯纳米纸中生物聚酯不同稳定性的晶体 2026-03-18
