中科院深圳先进院李光林/邰艳龙研究员《Sci. Adv.》:具有三维景深感知的人工遥感触觉器件
2022-11-01 来源:高分子科技
柔性触觉神经形态器件已成为人机协同发展的重要动力,然而,用人工智能实现其功能并进一步超越人类智能还面临着许多障碍与挑战。在这项工作中,研究团队提出了一种可拉伸自供能三维遥感触觉器件(3D remote tactile device, 3D-RTD),其通过导电-介电异质结构实现对外界物体在景深方向(depth-of-field, DOF)机械运动的感知。该器件能够通过感知信号的正/负、频率及振幅与外界物体DOF运动建立精确的逻辑关系。其感知机制通过静电场理论和多物理场模拟来揭示,感知性能通过微观/宏观交互的人工-生物混合系统进行验证。最后,作为神经界面贴片,3D-RTD的感知增强和辅助交互功能在避障场景中进行了演示,即大鼠在昏暗的环境中行走,在非接触状态下感受到潜在危险并传递信号给大脑,同时发生动作反馈,实现感觉-感知-交互全过程,这是传统的二维接触式传感器无法实现的。该工作展示了3D-RTD的场景联系与逻辑识别能力,并可与生物感知相结合,为多模态神经形态器件和类脑智能提供了一种新的选择。
图1 文章线上截图
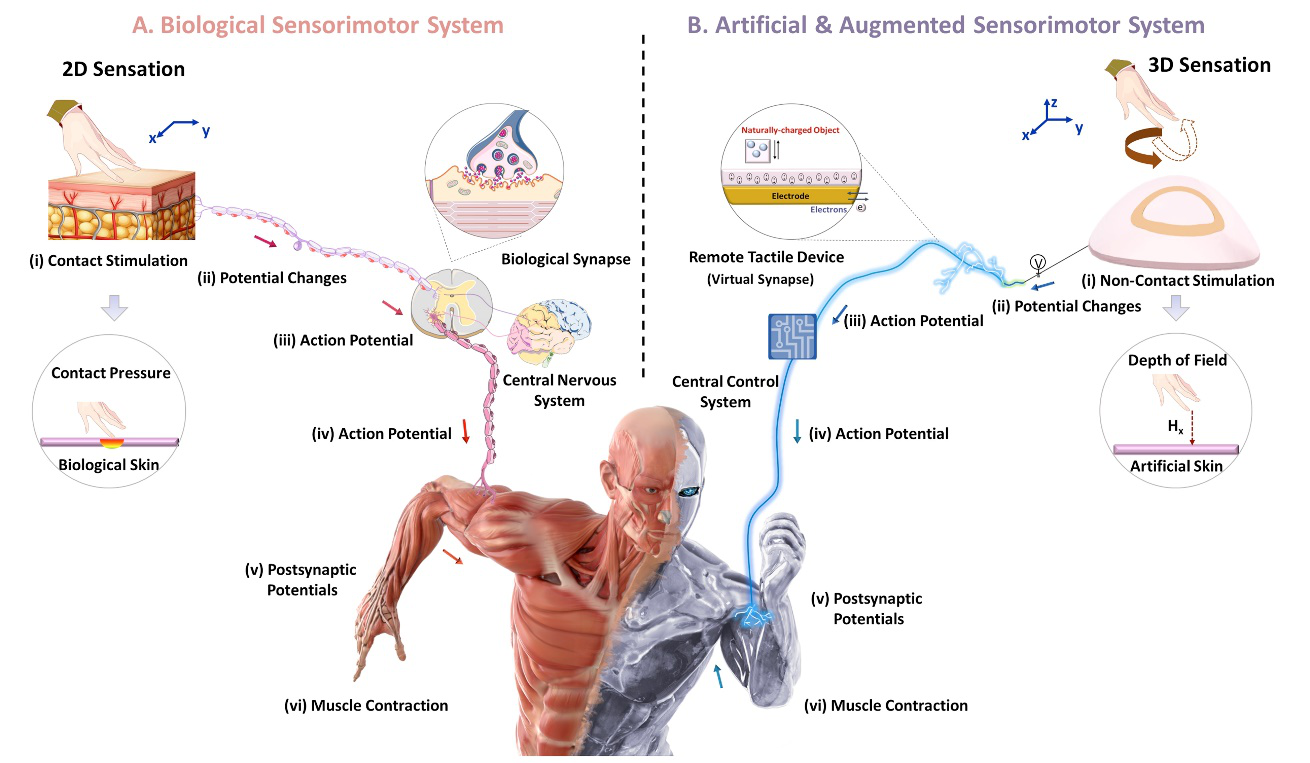
图2 一种超越皮肤功能的三维景深触觉器件

图3 人工3D遥感触觉系统(3D-RTS)集成到生物体神经肌肉系统中。

图4 三维景深触觉系统(人工-生物混合系统)在避障方面的应用,展示完整的感觉-感知-交互过程。
全文链接:https://www.science.org/doi/10.1126/sciadv.abo5314
版权与免责声明:本网页的内容由中国聚合物网收集互联网上发布的信息整理获得。目的在于传递信息及分享,并不意味着赞同其观点或证实其真实性,也不构成其他建议。仅提供交流平台,不为其版权负责。如涉及侵权,请联系我们及时修改或删除。邮箱:info@polymer.cn。未经本网同意不得全文转载、摘编或利用其它方式使用上述作品。
(责任编辑:xu)
相关新闻
- 华南理工朱伟、南科大余沛源、南洋理工赵彦利 Nat. Commun.:纳米隔室限域效应介导生物体内聚合反应 2023-08-30
- 斯坦福大学鲍哲南教授和美国退伍军人事务部Paige Fox合作研发出与生物体完全相容的可降解传感器 2018-05-16
- 浙江大学纳米材料与生物体系间互作研究获进展 2012-05-28
- 天大封伟教授、王玲教授团队 Matter:人工智能神经肌肉纤维束 2024-12-04
- 南开大学徐文涛教授团队 ACS Nano:一种由多象限人工传出神经控制的高强度神经肌肉系统 2022-11-08
