南京大学李承辉教授团队《Mater. Horiz.》:一种可变刚度且可修复的气动驱动器
2022-12-20 来源:高分子科技
气动机器人手臂由于其广泛的应用而受到越来越多的关注。然而,其固有的低刚度使得它们不能胜任需要高负载能力或高力输出的任务。另一方面,当施加过大的压力或遇到尖锐物体时容易受到损坏。为此,南京大学化学化工学院李承辉教授课题组设计并合成了一种具有高机械刚度(杨氏模量为1.9 GPa,断裂伸长率<2%)以及优异的变刚度特性(当ΔT=90°C时,软-硬态切换能力σ高达3268000倍)的配位自适应网络(PETMP-AIM-Cu)(图1)。同时他们还将PETMP-AIM-Cu与基于动态二硫键的自修复弹性体(LP-PDMS)相结合,设计了一种新的气动机械臂。该机械臂在室温下具有高负载能力,同时在加热时也能轻易变形,可以灵活得进行气动驱动。得益于PETMP-AIM-Cu和LP-PDMS优异的自修复能力,整个气动机器人手臂在破坏并修复后仍然可以正常驱动。优异的可变刚度和可修复性能使得这种气动机械臂在应对复杂环境时的应用也是非常有利的。该工作以“A Variable-Stiffness and Healable Pneumatic Actuator”为题发表在《Mater. Horiz.》上。该研究得到国家自然科学基金委的支持。
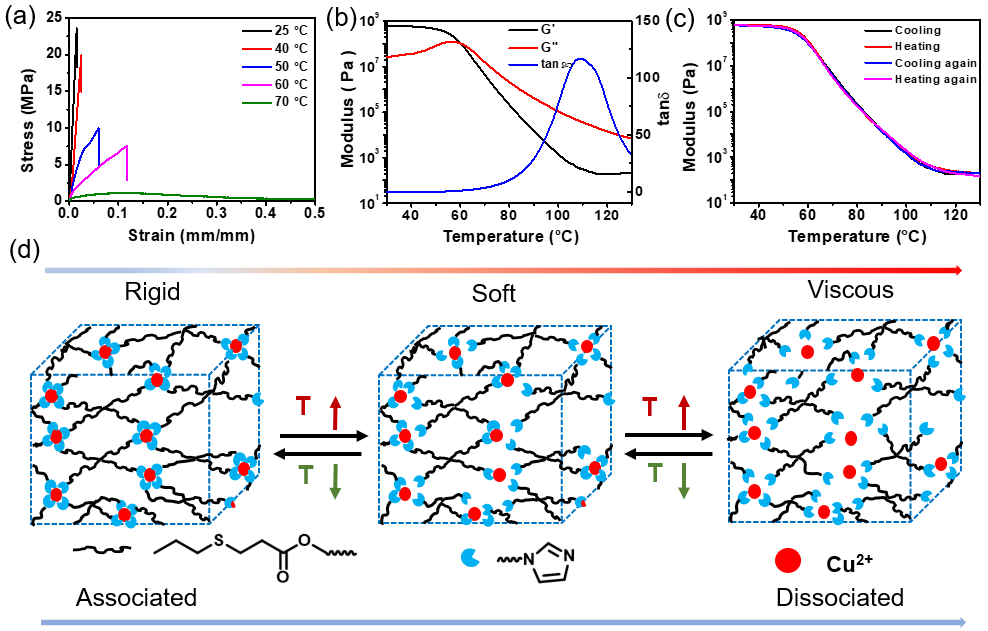
图1. 自适应网络(PETMP-AIM-Cu)的高强度及优异变刚度性能的表征及其动态性示意图
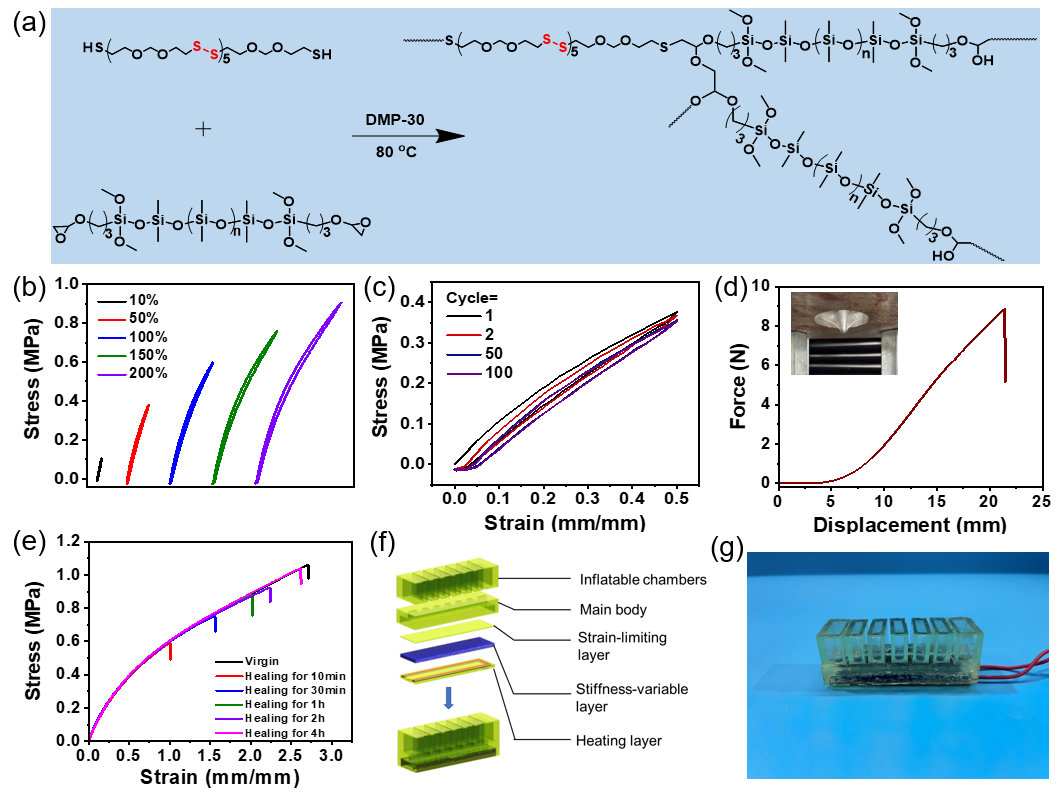
图2 弹性体外壳的力学性能以及气动机械臂的设计思路

图3气动机械臂的工作展示
原文链接:https://pubs.rsc.org/en/content/articlelanding/2023/mh/d2mh01056a
版权与免责声明:中国聚合物网原创文章。刊物或媒体如需转载,请联系邮箱:info@polymer.cn,并请注明出处。
(责任编辑:xu)
相关新闻
