液晶弹性体(LCE)是制备软体驱动器的重要材料。调节液晶弹性体的驱动温度可实现对其驱动开始条件的控制,但这通常在合成步骤时完成,且之后难以改变。另一方面,如果可以在合成后实现驱动温度的时空调节,则可以对LCE中的多个驱动起始点进行编码,从而使软驱动器具备执行逻辑化运动的能力。然而,由于需在复杂合成过程中调控液晶基元的区域化取向排列,这项任务极具挑战性。
近期,浙江大学化学工程与生物工程学院赵骞教授团队基于网络拓扑异构原理实现了液晶弹性体驱动温度的区域化调控,进而能够实现逻辑化的驱动行为,有望丰富未来软体机器人的驱动功能。该工作以“Programming actuation onset of a liquid crystalline elastomer via isomerization of network topology”为题发表于《Nature Communiaction》上。论文的第一作者为陈冠聪博士,通讯作者为金斌杰博士与赵骞教授。该研究工作受到了谢涛教授的支持与指导。
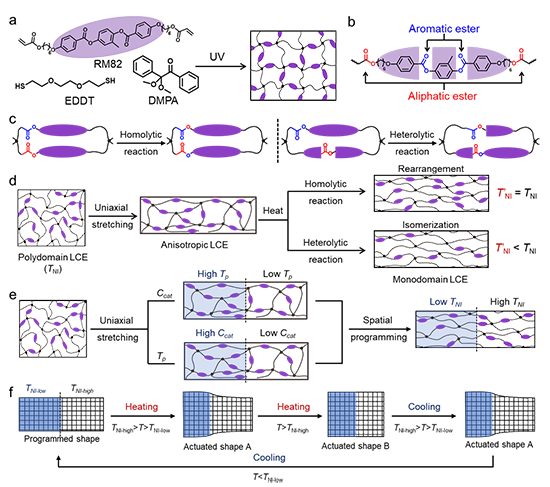
图1拓扑异构液晶弹性体网络的合成与编程
可拓扑异构的液晶弹性体网络内具有两种酯键,即存在于液晶相内的芳香族与非液晶相内的脂肪族酯键(图1a)。因此,该网络可发生两类不同的酯交换反应。具体而言,脂肪酯之间的同键交换能够固定液晶取向而不影响液晶相结构(不改变驱动温度),而芳香族和脂肪族酯之间的异键交换不仅可以固定取向,同时也能改变(降低)驱动温度(图1b-c)。通过光产碱催化剂对两类反应进行时空控制,从而实现驱动温度的区域化调控,进而在驱动几何形状和逻辑顺序上具有独特的可控性(图1e-f)。
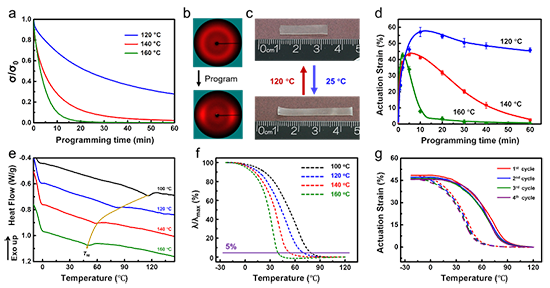
图2 LCEs的驱动程序(催化剂:1%中和TBD,预拉伸应变:50%)

图3 LCEs的驱动程序(催化剂:PBG,预拉伸应变:50%,编程温度: 120℃)
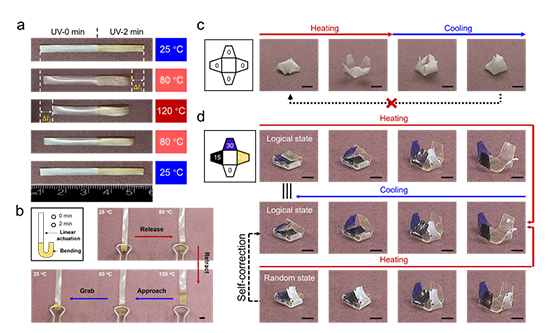
图4 LCE的逻辑化驱动方式
原文链接:https://www.nature.com/articles/s41467-023-42594-8
- 南开大学刘遵峰合作团队 AM:破解液晶弹性体纤维力学-驱动-阻尼三元矛盾→揭示全新连续液晶相变过程 2026-07-10
- 斯坦福赵芮可教授团队 Nat. Commun.: 具有时空可编程表面褶皱的光热驱动液晶弹性体多功能平台用于信息编码与物体操控 2026-07-01
- 天津大学封伟教授团队 Angew: 胆甾液晶弹性体变色光子材料前沿进展 2026-06-22
- 杭州师范大学刘俊秋/吴柏衡团队 Nat. Commun.:可编程驱动的Janus液晶弹性体纤维 2026-02-04
- 北航罗斯达教授 Sci. Adv.:激光编程软执行器-解锁仿生软体机器人变形定制新方法 2026-07-04
- UCLA贺曦敏团队 Sci. Adv. 封面:球形无系留自维持滚动机器人 2026-05-01
- 哈工大(深圳)朱时裴教授课题组诚招硕士、博士、博士后 - 材料、化学、物理、机械、生物工程 2025-09-17
