导电凝胶在人机交互(HMI)器件中展现出应用潜力,但其脆性、溶剂依赖性等缺陷长期制约实际应用。本研究通过设计一种无溶剂拉伸取向双网络深共晶凝胶突破上述局限。分子链缠结与拉伸诱导取向的协同效应显著提升材料力学力(133.86 MJ/m3)。取向微结构在形变中维持导电通路完整性,赋予材料多模态高灵敏度传感特性(250%应变下灵敏系数GF=1.4;温度响应系数TCR=14.7% oC-1)及稳定性(>300次循环无信号突变)。通过溶液印刷和UV固化,应用于功能性HMI器件:体感手套(关节运动识别延迟≤17 ms)、电容传感阵列(响应延迟≤34 ms)及高分辨率温度传感器。
近期,澳门大学应用物理及材料工程研究院孙国星团队创新性地提出“拉伸诱导取向增强”策略,通过分子层面的协同作用机制,成功开发出力诱导排列双网络深共晶凝胶。采用预溶解策略将超高分子量聚丙烯酰胺引入丙烯酸/氯化胆碱深共晶体系,形成稳定的双网络结构,材料展现出30.7 MPa的拉伸强度(703%断裂伸长率)和133.86 MJ/m3的韧性,较对比样提升6.2倍(图1c-d)。压缩测试显示98%形变后仍能恢复96%原始尺寸,边缘缺口试样断裂应力达5.85 MPa,较对比样品提升4.3倍。通过偏振光照片分析裂纹及应力分布(图2e-f)显示显著差异:0%M1000样品在裂纹尖端形成局部沙漏状应力集中区,而3%M1000样品呈现全域扩散型应力分布。结合有限元分析对比样的von Mises应力呈沙漏分布(尖端峰值26 MPa),而3%M1000样品von Mises应力表现为层状扩散,(尖端峰值62 MPa,较对比样提升2.4倍)。通过偏振光照片和有限元分析揭示其增强机制:超长PAM链在拉伸时形成取向排列,将裂纹尖端的局部应力传递至整个网络(图2h)。动态氢键网络通过可逆断裂耗散能量,同时PAM缠结网络阻碍裂纹扩展。这种“整体缠绕增韧+长程取向强化+短程动态耗能”的协同作用,突破了传统材料强度与延展性的此消彼长规律。
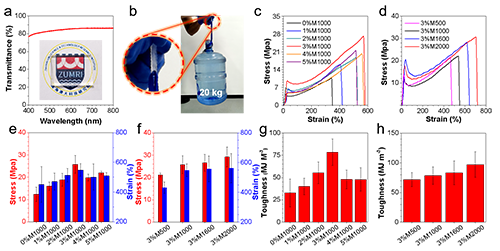
图1. a)双网络深共晶凝胶透光率。b)提拉20 kg重物照片。c)不同PAM含量的双网络深共晶凝胶应力-应变曲线。d)不同分子量PAM的双网络深共晶凝胶应力-应变曲线。e)和 f)样品平均应力与应变值。g)和 h)样品韧性值。
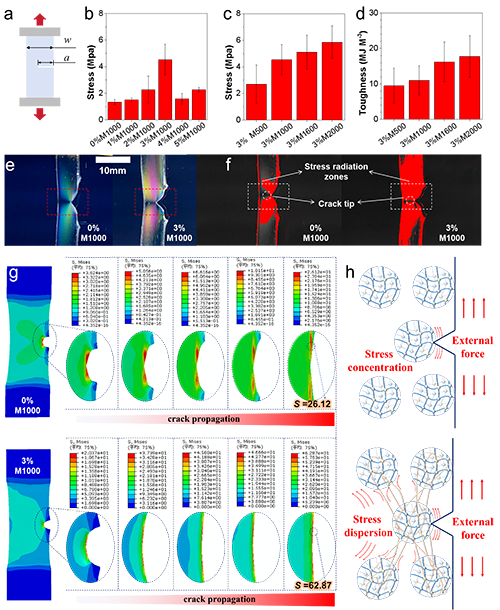
图2. a)边缘缺口试样拉伸实验示意图。不同PAM含量缺口试样的拉伸应力曲线(b)、(c)。d)胶韧性值对比。e)偏振光照片。f)偏振光强度分布图。g)有限元模拟。h)外力作用下的微观结构模型。
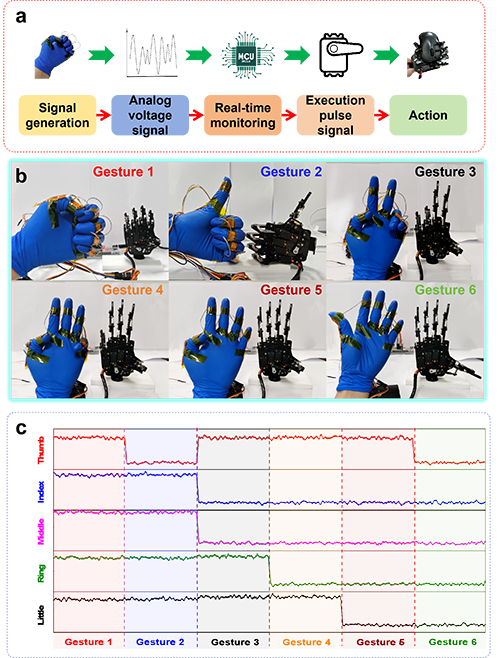
图3.体感手套 实时控制的仿生机械手。a)信号–执行示意图。b)实物图,c)模拟电压信号曲线图。
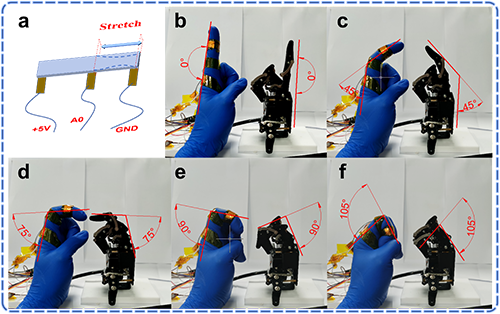
图4. a)接线图。体感手套精确调控机械手指关节弯曲角度,关节弯曲角度分别为:b)0°、c)45°、d)75°、e)90°及f)105°。
单轴拉伸测试显示:相对电阻变化(ΔR/R0)随应变呈线性增长(GF=1.4,R2=0.9955)。材料的液态和UV固化性,使之加工方式多样且简易,制备了:(1)体感手套,用于实时人体运动捕捉与仿生手控制,其工作流程如图3a所示:手指弯曲引发传感器的应变-电阻变化,产生连续模拟电压信号,经芯片处理后驱动机械手的步进电机,响应速度≤17 ms。图4b–f展示了连续单关节运动追踪功能:模拟电压输出与关节角度(45°、75°、90°、105°)呈线性关联且轨迹偏差微小。对比现有技术:a)摩擦纳米发电机(TENG):虽可实现自供电传感,但其脉冲式输出限制其连续运动控制;b)热电传感器:依赖关节温度梯度,存在响应迟滞与空间分辨率低等缺陷。(2)4×4电容阵列传感器(图5),通过浸渍或印刷工艺可制备电容式传感器,与压力依赖型电阻阵列不同,该设计基于电容调制原理,可同时实现接触与接近传感,可多点触控检测,位置追踪,响应快≤34 ms。(3)柔性透明温度传感器(图6),其调控机制源于三方面协同作用:a)聚合物链段动力学(温度激活的链运动性调控离子通道可及性);b)温度依赖的非共价键断裂/重组调节离子通道密度;c)热激活离子传输(离子热运动)。在低温区(-24–9.4 oC)表现出优秀的温度传感性能(TCR = 14.7% °C-1)。
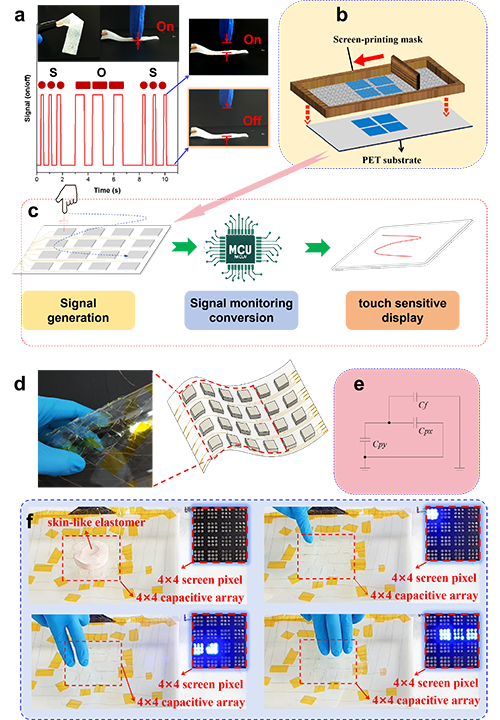
图5. 电容式传感器阵列,a)基于电容信号编码“SOS”的摩尔斯电码实现示意图。b)印刷法制备柔性传感器阵列。c)电容触控屏信号-执行流程图。d)电容传感器阵列实物图与结构示意图。e)电容触控电路原理图。f)检测触控输入的电容式触控传感器阵列工作实拍图。
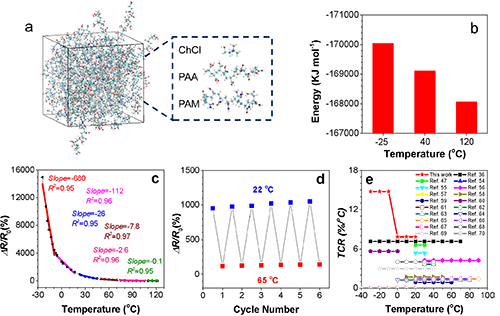
图6. a)分子动力学模拟构型。b)不同温度下的非共价键结合能。c)ΔR/R0温度响应曲线。d)ΔR/R0热冷循环变化曲线。e)本工作与已报道温度传感器的温度响应系数(TCR)对比。
结论
该研究开发了一种无溶剂双网络深共晶凝胶,通过“整体缠绕增韧+长程取向强化+短程动态耗能”的协同作用,突破了传统材料强度与延展性的此消彼长规律。基于此双网络深共晶凝胶平台,构建多模态传感器,为人机界面及智能软体机器人材料提供了不同的思路。
原文链接:https://doi.org/10.1002/adfm.202508233
- 东华大学朱美芳教授课题组:异相成核与拉伸取向协同诱导熔纺生物基PHBV纤维的晶体结构转变 2017-07-17
- 上海交大史子兴教授团队 AFM:铁离子光引发原位聚合制备新型双网络材料 2026-07-13
- 华南理工刘伟峰、广东工大邱学青 AFM:木质素构筑动态液晶双网络 - 打造高性能光热驱动人工肌肉 2026-03-27
- 哈工大刘宇艳教授/张东杰副教授团队 AFM:基于相分离双网络聚合物实现形状恢复起始温度的可编程调控 2026-01-12
- 华南理工刘伟峰、广东工大邱学青 CEJ:无溶剂原位界面改性策略实现木质素/PBAT复合材料力学、阻隔与耐老化性能协同提升 2026-03-31
- 福州大学赖跃坤课题组 AFM:一步、无溶剂、双固化策略 - 打造无氟全疏涂层,赋能水下光学系统透明长效防护 2026-01-27
- 甬江实验室方磊教授团队 AFM:无溶剂介导的热塑性聚氨酯复合材料-具有稳定、可逆的热荧光响应 2025-12-05
