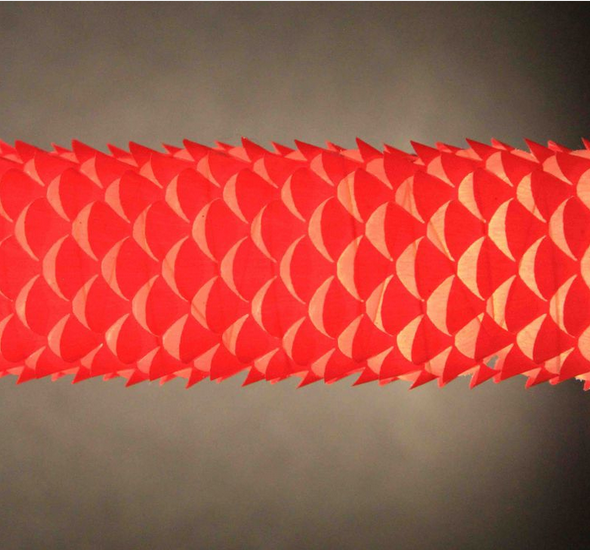
近日,哈佛大学科学家创造出一种新型软体机器人使用人造鳞状皮向前移动,这看起来有点像蛇。这个软体机器人其实是一个硅橡胶管。但其特殊之处在于它的“皮肤” - 一种用激光切割的薄而可拉伸的塑料片。
三角形或圆形的切口类似于蛇皮上的鳞片。
当空气被泵入管内时,机器人会膨胀并收缩,从而使得鳞片弹出,锚定在表面上,并将机器人向前拉。在周三发表在《科学·机器人学》(Science Robotics)的一项研究中,科学家们表明,人造蛇皮可以抵抗像沥青和混凝土这样的粗糙表面。将来,这些机器人可能会缩小并用于在动脉内输送药物,或者在机器人需要在狭窄空间内爬行的灾难情况下。

此前科学家已经受大自然启发研发了各种机器人。此次软体机器人的灵感来自蛇。为了模仿蛇皮,哈佛大学博士后研究员 Ahmad Rafsanjani参照了日本称为kirigami的剪纸艺术。他用激光切割成线条、三角形、圆形或梯形的薄塑料片。然后将皮肤缠绕在由空气驱动的硅橡胶管上。 (空气通过管道泵送,或者由于带有泵,电池和传感器的小型控制单元。)

机器人以这种方式工作:当硅橡胶管充气或放气时,它向前伸展,使鳞片弹起并抓住表面。过程中产生的摩擦推动机器人前进(但不是向后;研究人员仍然试图弄清楚)。鳞片皮很容易制作,并且可以省略工程师制作执行器以实现移动的复杂步骤。Rafsanjani和他的同事们也尝试了不同的比例形状:其中梯形是最有效的,允许更长的步幅。
这个机制看起来很简单,但实际上花了一年半的时间才得以完善。在全部问题得到解决之前,Rafsanjani制作了数百个皮肤和约50个软机器人实现这样一个简单的动作。
论文链接:http://robotics.sciencemag.org/content/3/15/eaar7555.full
- 北航罗斯达教授 Sci. Adv.:激光编程软执行器-解锁仿生软体机器人变形定制新方法 2026-07-04
- UCLA贺曦敏团队 Sci. Adv. 封面:球形无系留自维持滚动机器人 2026-05-01
- 哈工大(深圳)朱时裴教授课题组诚招硕士、博士、博士后 - 材料、化学、物理、机械、生物工程 2025-09-17
- 四川大学高分子科学与工程学院 Adv. Mater.:硼辅助热机械剪切实现硅橡胶的升级回收 2026-07-23
- 青科大张建明、陈玉伟 ACHM:提出离子液体助推BN电场取向的新策略 - 实现硅橡胶复合材料导热性能提升 2025-12-15
- 巧调单体比例,优化氟硅橡胶性能 - 山东大学周传健教授课题组 Macromolecules 发文揭示立体结构调控机制 2025-08-28
- 福建农林大学帅李教授团队 Prog. Polym. Sci.:木质纤维素基可降解塑料 - 从分子结构到多尺度功能设计 2026-07-27
