人可以跳机械舞,但机器人却不能跳芭蕾舞。一直以来,研发灵活精细且具有类人功能的机械手是人们追求的目标。然而,越灵活精细的结构,越复杂的功能终将导致假肢的尺寸、重量远超正常人手。因此,简化其动力布局及反馈电路系统成为一种必然趋势。相比于基于杠杆、铰链和齿轮等动力系统的传统机械手,基于肌腱驱动的人体生物学假肢则更简洁,更灵活也更具有合适的尺寸。
目前,商用的人体生物学假肢有Okada机械手,Utah/MIT机械手以及DLR机械手。这些机械手的仿真肌腱主要由尼龙、橡胶、PET材料等制成。而这些传统材料的韧性较差(韧性是指材料在断裂前每单位体积所吸收的能量),不足以应付假肢长期且多次重复的使用。另一方面,上述材料均不导电,不能将反馈电路与动力系统集成为一个简化的系统进而实现设计尺寸的缩小。因此,开发同时具有高韧性和高电导率的肌腱材料则成为关键。
近日,新加坡南洋理工大学陈晓东教授研究团队、浙江大学李德昌教授和新加坡A*STAR程渊高级研究员研究团队合作将高韧性材料蜘蛛丝改良,引入PEDOT:PSS@SWCNT,使蜘蛛丝同时具有高韧性和高电导率,使其韧性值达到420 MJ/m3,电导率达到1077 S/cm,性能超过目前的导电材料(如图1所示)。
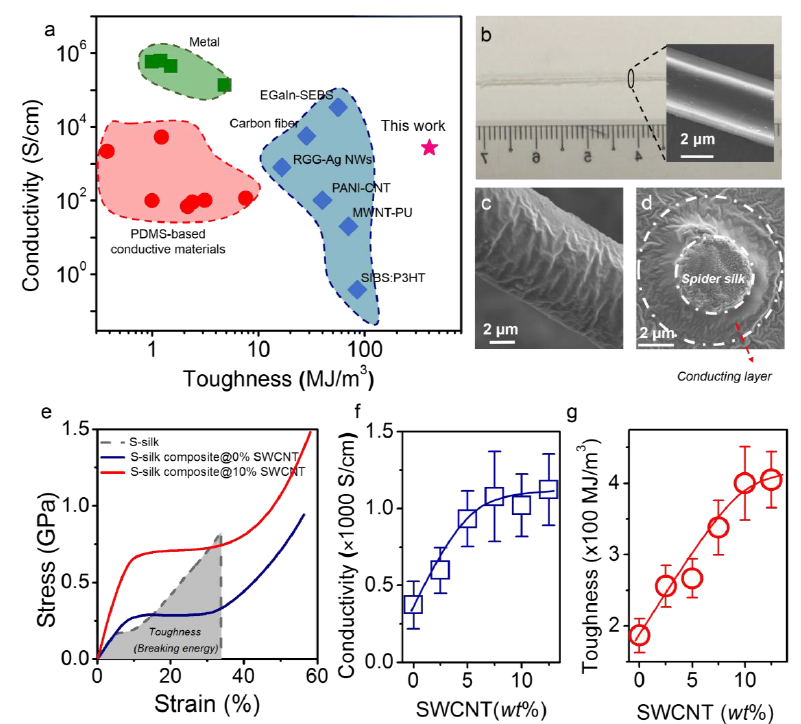
图1. (a)不同导电材料的导电率以及韧性的比较,粉色五角星代表本工作;(b)蜘蛛丝实物图;(c)(d)导电蜘蛛丝的电镜图以及横截面图;(e)导电蜘蛛丝的应力应变曲线;(f)(g)导电蜘蛛丝的电导率以及韧性随单壁碳纳米管含量不同的变化曲线。
研究人员将引入了单壁碳纳米管的蜘蛛丝制备成了“电肌腱”,该电肌腱同时具有高电导率和高韧性,与压力传感器一起组装到具有人体生物学结构的机械手上,并测试其性能。结果显示该机械手的单根肌腱能够承受最大约7.6 Kg的负载,同时该肌腱能够重复拉伸/弯曲超过4万次而其电导率基本保持不变(如图2a和2b)。使用该电肌腱机械手的综合性能远超以钢丝,尼龙,碳纤维、橡胶等材料为肌腱的机械手的性能。最后研究人员考察了基于导电蛛丝和非导电尼龙仿生假肢抓取物体的过程。通过对比发现,因为集成了压力反馈系统,基于电肌腱的机械手能够很好的抓取气球。而基于尼龙的机械手却难以抓取(如图2c和2b)。该工作对研发灵活且具有多功能的假肢提供了新的思路。
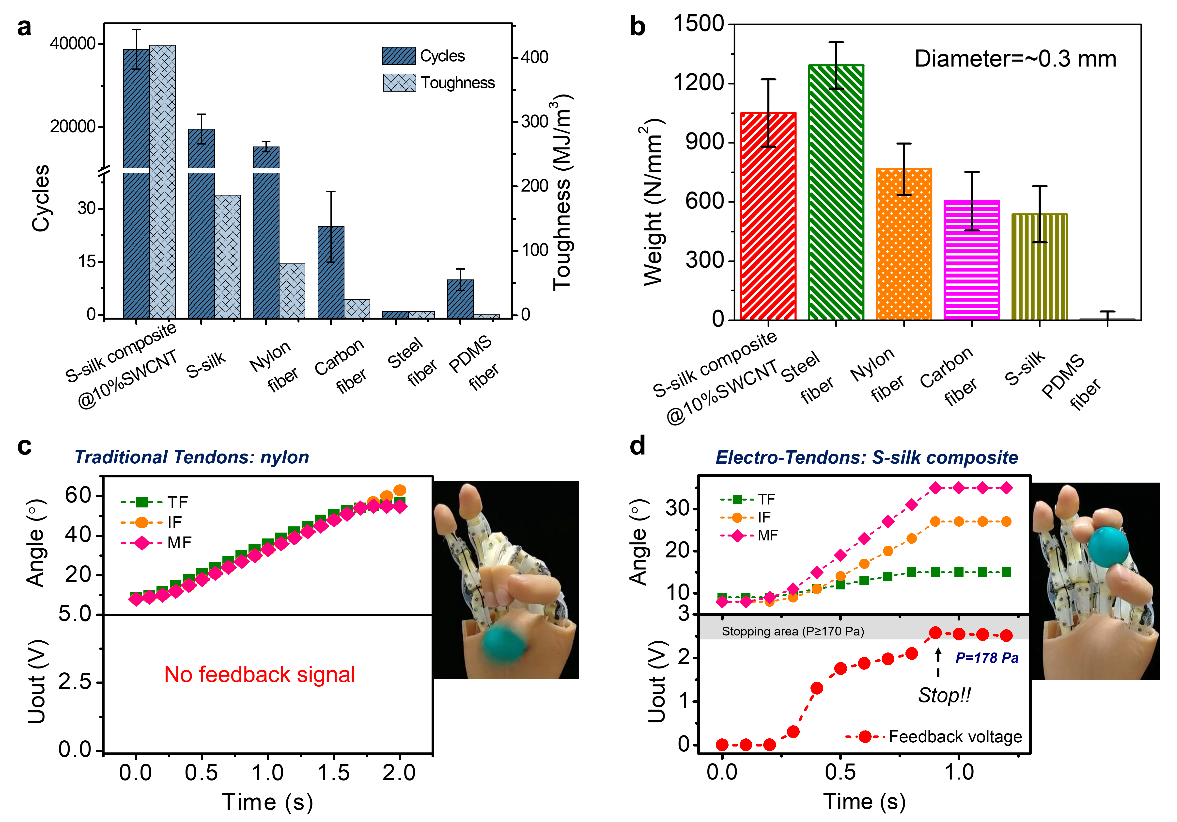
图2. (a)基于不同材料机械手的拉伸弯曲次数比较;(b)基于不同材料机械手负载比较;(c)(d)基于尼龙以及导电蜘蛛丝的机械手抓取气球的过程比较。
相关工作以题目为 A supertough electro-tendon based on spider silk composites 发表在Nature Communications (Nat. Commun. 2020, 11, 1332)上,并申请专利一项:Singapore Patent Application No. 10201807020R。此项研究工作还得到了新加坡A*STAR的张勇伟教授和浙江大学季葆华教授的大力协助。
- 西南交大机械工程学院 Mater. Horiz.:通过柔性彩色光波导进行指尖触觉传感 2023-09-01
- 新传感器技术可实现意念操控机械假肢 2017-02-10
- 斯坦福大学华人教授:人工皮肤能让假肢变真? 2016-02-29
