与工业机械中传统的电磁马达不同,人工肌肉是一类单组件设备,当受到外部刺激(如光、电、热、溶剂等)时,能够可逆地伸缩、旋转或弯曲,在小型机器人和生物医学设备中具有广泛的应用前景。尽管人工肌肉已成为研究热点,但仍存在冲程小、生物相容性差等局限性。为解决上述问题,人们通过采用不同的策略优化聚合物网络,开发水凝胶人工肌肉。受天然肌肉各向异性结构的启发,各种具有高度有序结构的纳米复合水凝胶成相续报道。纳米纤维素通过外部电场/磁场、剪切力、牵伸力和冰模板在聚合物网络中实现可控排列,形成高强度各向异性水凝胶。纳米纤维素增强的水凝胶人工肌肉可通过连续拉伸、扭转和卷绕制备而成。由于其卷须状结构,水凝胶肌肉的收缩冲程可达到87%,但该水凝胶的输出效率远低于天然肌肉的输出效率(~40%)。因此,开发出兼具大冲程、高做功和高输出效率的水凝胶人工肌肉仍然是一项巨大的挑战。
近日,武汉大学常春雨教授课题组通过设计和优化水凝胶三重的交联网络结构实现人工肌肉大冲程、高做功和高输出效率。利用网络结构中疏水相互作用和静电相互作用实现水凝胶的高延展性,最大程度牵伸水凝胶后,通过离子配位作用固定高度取向的纳米纤维素并储存机械能。在酸性条件下,完成水凝胶人工肌肉的快速收缩和机械能释放。这种水凝胶可以作为肱二头肌实现手臂弯曲,也可以作为微型马达来驱动船模的运动。这项工作为开发大冲程、高做功和高输出效率的水凝胶肌肉提供了一种新思路。相关工作以“Triple Physically Cross-linked Hydrogel Artificial Muscles with High-Stroke and High-Work Capacity”为题,发表在《Chemical Engineering Journal》上。

图1. 水凝胶人工肌肉的制备示意图:(a)双物理交联水凝胶;(b)三重物理交联水凝胶人工肌肉。

图2. 具有不同预牵伸应变的水凝胶人工肌肉形貌结构(左至右:0%、300%、600%和900%):(a, b)水凝胶的AFM和SEM图像;(c, d)水凝胶的2D SAXS和WAXS图像;(e, g)SAXS和WAXS模式的方位积分强度分布曲线;(f, h)预牵伸应变对SAXS和WAXS中取向度(fc)的影响。
水凝胶肌肉的驱动性能与浸泡时间、酸浓度以及预牵伸应变密切相关。当浸泡时间为8 h和酸的浓度为2 M时,肌肉的驱动速度最快,最大收缩冲程可达到75%。随着预牵伸应变从0增加到900%,水凝胶肌肉储存的机械能最大可达到482 J kg-1。此外,水凝胶肌肉的做功、输出效率和循环性能的结果表明水凝胶肌肉的最大做功和输出效率分别位为210 J kg-1和40.3%,并展现出良好的循环性能。相比与其他驱动材料在冲程、做功以及输出效率方面,展现出明显的优势(图3)。

图3. 水凝胶的驱动性能:(a)水凝胶肌肉储存和释放机械能示意图;(b, c)不同浸泡时间的水凝胶肌肉的驱动动力学;(d)预拉伸应变为300%、600%和900%时水凝胶肌肉的储存的机械能;(e)水凝胶肌肉在不同浓度酸刺激下的驱动动力学;(f)水凝胶肌肉的循环性能;(g)水凝胶肌肉的驱动应变和做功的应力依赖性;(h)水凝胶肌肉的最大做功和输出效率;(i)水凝胶肌肉的做功和收缩冲程与报道的材料对比图。
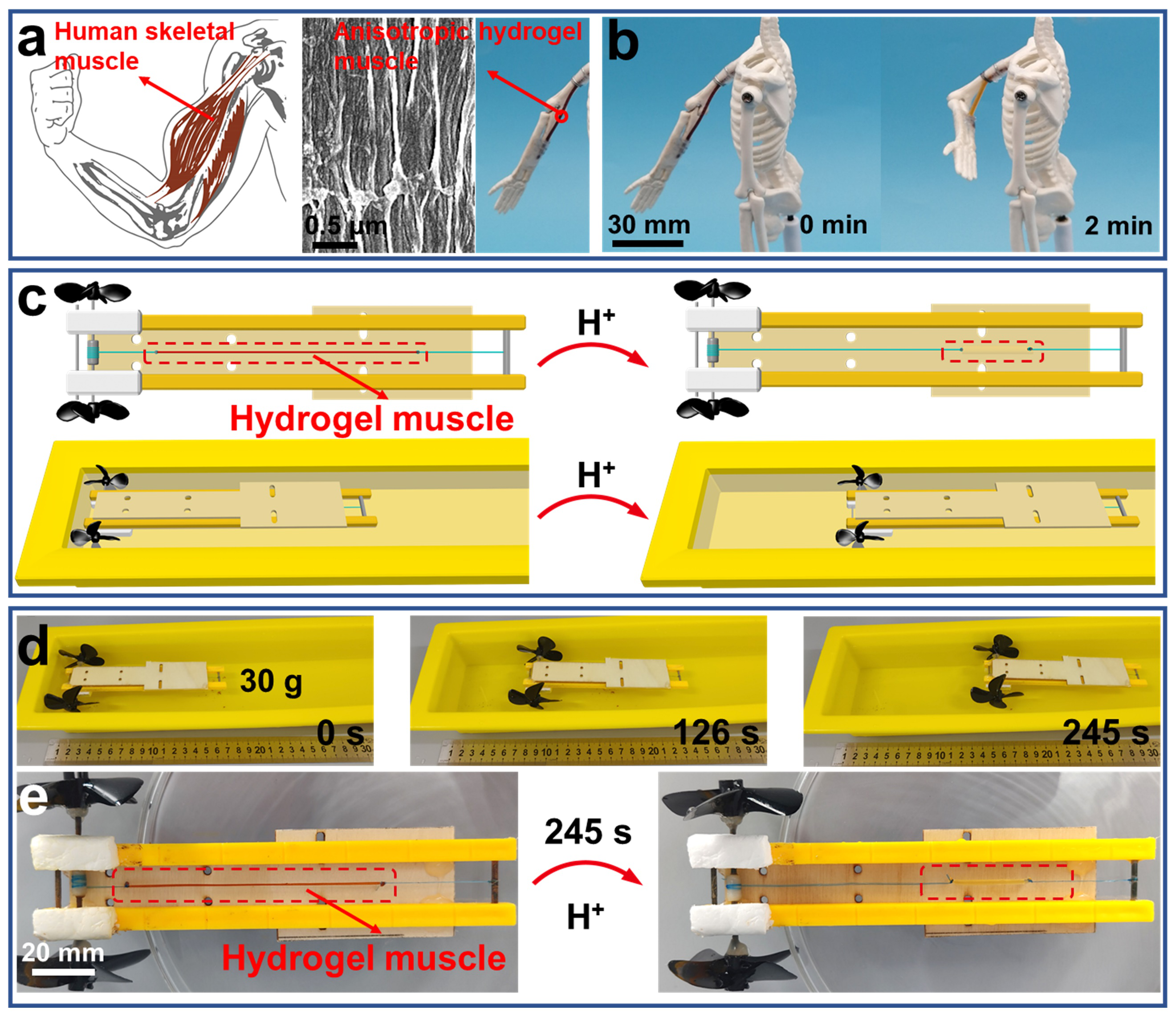
图4. 水凝胶肌肉的应用:(a)人体骨骼肌示意图和各向异性水凝胶肌肉的SEM图像;(b)水凝胶肌肉模拟手臂二头肌;(c)船模型的结构和设计示意图;(d)水凝胶肌肉作为微型马达驱动的船模的运动;(e)驱动前后的船模底视图。
原文链接:https://www.sciencedirect.com/science/article/abs/pii/S1385894722053736
- 青岛大学隋坤艳、范汶鑫/宁波材料所陈涛 Angew:聚合动力学调控拓扑缠结实现水凝胶高对比度3D自变形 2026-07-21
- 长春工大刘鑫、张钦课题组 Angew:一种兼具高机械强度与高锌离子迁移率的可回收超分子水凝胶电解质用于稳定锌负极 2026-07-13
- 浙江大学赵骞教授、浙江省肿瘤医院张宇华团队 Adv. Mater.:在可编程的自发变形水凝胶方面取得进展 2026-07-12
- 东华大学张青红教授等 AFM:基于高强导电同轴MXene纤维的多响应人工肌肉 2026-06-15
- 华南理工刘伟峰、广东工大邱学青 AFM:木质素构筑动态液晶双网络 - 打造高性能光热驱动人工肌肉 2026-03-27
- 武汉纺大夏治刚/南开刘遵峰/中国药大周湘 Matter:扭转自振荡人工肌肉 2026-02-08
- 青科大王文嫔/李志波教授团队 JMCA: 在自修复聚硅氧烷弹性体方面取得新进展 2022-11-01
