清华大学张明君教授和徐静副教授团队 Sci. Adv.:肠驱动仿生微针机器人用于生物类药物无痛口服递送
2024-01-11 来源:高分子科技
近年来,多肽、蛋白质和核酸等生物大分子药物在重大疾病的治疗中发挥着越来越重要的作用。但该类药物在胃肠道内存在易降解、吸收率低等问题,目前主要依赖于传统的注射给药方式,在使用便捷性、患者依从性和感染防控等方面存在诸多问题,广泛的口服用药社会需求难以满足。
胃肠壁微针给药装置是近几年来提出的一种极具潜力的口服药物递送装置。通过驱动载药微针刺入胃肠壁,药物能够有效地突破黏液层和上皮细胞,直接递送到胃肠壁组织中并通过毛细血管吸收,因此能够有效递送药物并具有通用性。但是,现有研究主要依赖弹簧、气球或外部磁场作为微针驱动单元,在给药成功率、材料安全性和病人依从性上等方面仍面临众多挑战。因此,开发一种新型口服给药装置具有重要意义。


图1 肠蠕动驱动的刺豚启发的用于口服递送生物药物的微针机器人
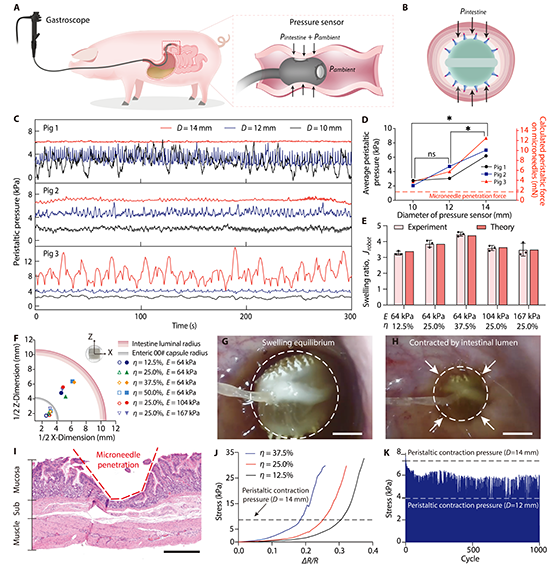
图2 肠道测压及微针穿刺实验
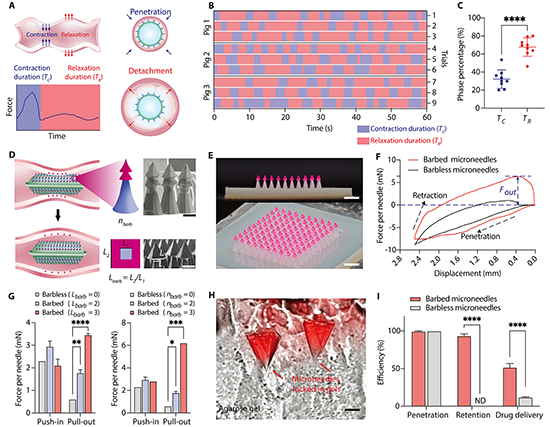
图3 倒刺微针设计及实验
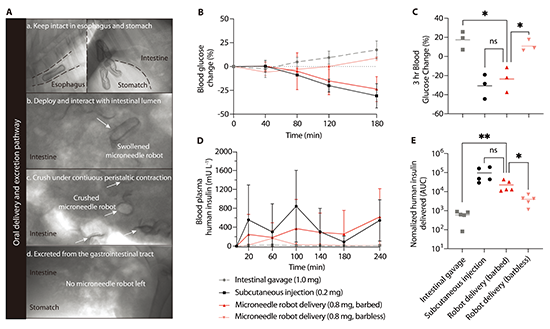
图4 微针机器人的有效性和安全性验证
原文链接:https://www.science.org/doi/10.1126/sciadv.adj7067
下载:Pain-free oral delivery of biologic drugs using intestinal peristalsis–actuated microneedle robots
版权与免责声明:中国聚合物网原创文章。刊物或媒体如需转载,请联系邮箱:info@polymer.cn,并请注明出处。
(责任编辑:xu)
相关新闻
