利用弹性体材料设计的具有高自由度、高适应性的软机器,已经成为了新的研究热点。为了保证它们的自适应性和安全性,需要合适的传感器件来实现运行过程中的实时反馈与感知;从而为进一步的控制打下基础。对软机器来说,一个合适的传感器需要具备以下几个特点:柔软、可拉伸、易集成。基于离子导电的水凝胶材料天然地满足前两者。但是,在集成性方面,由于疏水的弹性体和亲水的水凝胶之间的粘接强度通常很弱,目前仍然缺少一种简单易行的粘接方法来攻克这一难题。
近日,哈佛大学锁志刚教授和Robert D. Howe教授课题组合作提出了一种能够应用于已成形弹性体结构的贴附式大变形传感器。通过引入硅烷偶联剂的化学机理,在已成形的弹性体表面引入硅烷改性的弹性体漆,再将硅烷改性的水凝胶传感器通过贴附的方式进行粘接,便可以简单有效地实现传感器与软机器的集成。这种策略将软机器和传感器的制造进行了分离,并为软机器的嵌入式传感技术提供了潜在的设计空间。本工作所实现的粘接强度超过水凝胶本身的韧性。研究人员通过准静态、疲劳以及多频动态载荷测试展现了传感器的优良性能:实现400%应变的传感测量而不破坏传感器;传感器可以在1500个循环载荷下保持稳定性,以及具有至少10 Hz的工作带宽。研究人员进一步通过将水凝胶传感器集成于柔性气动驱动器,展示了传感器在驱动器自由变形过程中对其形态的有效感知。该工作有望为软机器功能性和精准控制的发展提供帮助。
1、材料合成与粘接原理

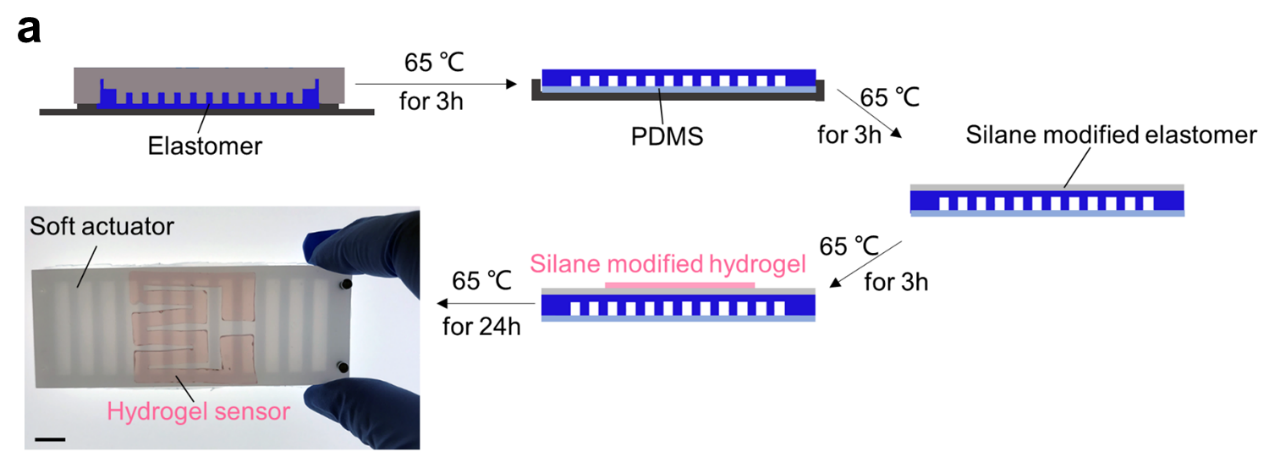
如图a所示,水凝胶传感器的合成是将聚合物单体和硅烷偶联剂通过自由基聚合反应,结合相应的交联剂进行共聚得到。其中,由于添加有保水性能优异的氯化锂,使得传感器本身具有较好的保水性和较高的导电率。在传感器的制备之后,其与弹性体集成过程的步骤如图b所示,主要分为以下四步:首先,制备一块弹性体结构,其表面不具有任何特殊的官能团;之后,在其表面涂上一层含有偶联剂的弹性体预聚液,由于其与基底具有相同的化学性质,预聚液中的弹性体高分子链能够渗透入已成形的弹性体聚合物网络,同时也会与网络进行缠结,从而形成拓扑粘接;在弹性体漆固化后,再将之前合成的水凝胶贴附在其表面;在65℃环境中加热24个小时后,水凝胶网络和弹性体网络上的偶联基团会互相缩聚形成化学键。这样,硅烷改性的弹性体漆作为中间层,与成形的弹性体进行拓扑连接,同时也通过共价键与水凝胶连接,最终实现了水凝胶与弹性体结构的粘接。

为了评估水凝胶与弹性体间的粘接强度,研究人员进一步利用90度剥离测试进行了界面粘接能的测量,如图c所示。通过典型的力-位移曲线展示出的粘接能约为60 J/m2。在剥离过程中,裂纹是沿着水凝胶层扩展的,在弹性体表面能够看到有明显的水凝胶残留,证明了此粘接方法能够实现比水凝胶本身还强的界面强度。为了展示粘接样品的拉伸性能,一块透明的水凝胶图案被贴附在一块2mm厚的弹性体表面(图d),此双层结构能够在发生两倍拉伸变形时保持稳定的粘接,水凝胶能够与弹性体保持相同的变形。
2、阻抗分析与拉伸性能表征

水凝胶传感器不同于以往的电子导体,由于凝胶与金属导体之间界面双电层(EDL)的存在,其阻抗的大小与测试频率紧密相关。研究人员首先制作了哑铃形水凝胶试样并粘接在长方形弹性体基底上,对其进行了准静态测试,如图a所示。外部测量电路(图b)通过导电织物直接与水凝胶两端连接。为了保证连接稳定,仅有水凝胶中间的细长部分受到拉伸。在等效电路中,水凝胶的细长部分可视为纯电阻,用 R0表示。利用电化学中的Randles电路模型,将水凝胶两端与电子导体的接触部分视为电双层电容和电荷传输电阻,分别用 CEDL和RCT表示。通过在不同电信号频率下的阻抗测量,研究人员最终确定使用10 kHz作为水凝胶阻抗稳定的门槛值,并作为传感器表征测试中的测量频率,此时水凝胶的阻抗仅取决于中间纯电阻部分,其余部分的阻抗可以忽略。
在水凝胶的拉伸测试中,水凝胶能够与弹性体基体共同变形4.5倍而不会发生脱粘现象(图d)。由于水凝胶的变形只会改变聚合物网络结构以及水分子的分布,而对离子的电导率几乎没有影响,所以水凝胶传感器的阻值仅与其外形有关,理论上其电阻变化满足 R/R0 = λ2的关系,该理论预测曲线在图e中与实验数据吻合得很好。
3、疲劳与动态响应表征
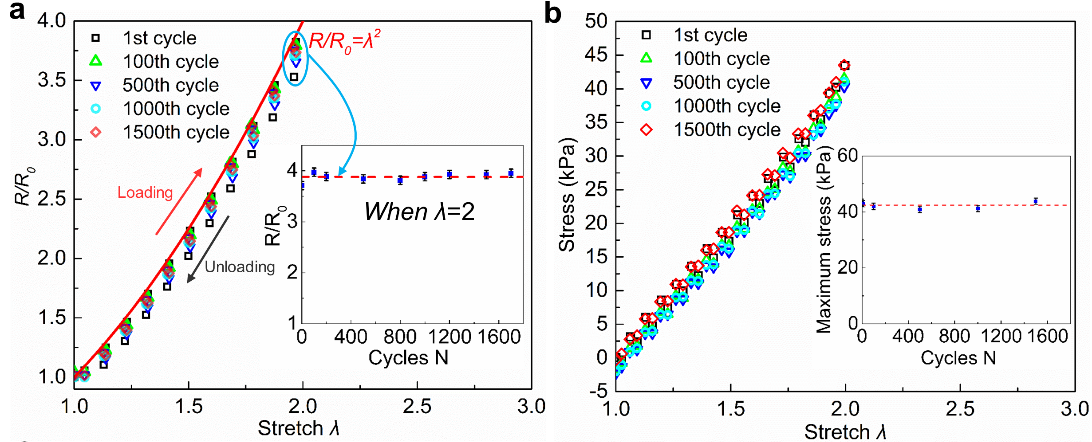
稳定性是传感器的一项重要性能指标,而以往的柔性传感器在经过循环载荷作用后,往往都具有一定的漂移和滞回现象,制约了传感器的精度和寿命。为了表征水凝胶传感器在长时间循环载荷下的性能,研究人员对其进行了疲劳测试,来检验其在重复运行时力学与电学属性的稳定性。为了减缓水凝胶传感器的在长时间加载过程中的水分流失,此处的水凝胶用弹性体薄膜封装,循环加载结果如图a所示。在不同的循环周期内,传感器的电阻变化比与拉伸率的关系仍然满足理论预测,并且在1500个循环载荷中,电阻变化基本没有滞回现象存在,表明了传感器的电学稳定性。另外,在图b中,水凝胶-弹性体结构的应力-拉伸率曲线在1500个载荷中基本都与第一个载荷中的曲线重合,最大应力维持在40 kPa左右,没有明显的应力迟滞现象,展现了其力学性能的稳定性。

为了测量软机器的瞬态变形状态,水凝胶传感器需要在相应的机械频率下保持较高的响应速率,现有的气动软机器的运动频率一般在4到5 Hz以下。研究人员对水凝胶传感器进行了不同机械频率下的动态测试,测试带宽为0.1 Hz到10 Hz,如图c和d,图中数据点为水凝胶电阻变化比R/R0,实线代表机器加载的拉伸率平方 λ2。在低频与高频测试的结果中,传感器都展现了变形与电阻变化的完整同步,并且在每个测试频率下电阻变化比满足理论的预测,表明了水凝胶传感器在各个频率变形情况下的稳定性。基于这些测试结果,水凝胶传感器能够有效地满足大部分软机器的应用场景。
4、水凝胶传感器在柔性驱动器上的应用
研究人员通过将水凝胶传感器贴附在气动柔性驱动器的表面对其形态感知的功能进行了展示。图a中的驱动器是通过注模的方式成型,再通过表面涂层的方法引入官能团,最后将水凝胶贴附在其表面实现两者的集成。该过程对本工作中的粘接策略进行了验证,并能够应用于各种已成形的弹性体结构。

图b中展示了驱动器在不同气压下的变形过程,同时研究人员记录了变形时顶部的转角变化,如图c所示。为了在实际应用中预测驱动器的转角,可以通过建立电阻变化比与转角的函数关系来实现,实验数据与拟合曲线如图d所示,在得到一定的实验数据后,通过三次多项式拟合便可以实现高精度的预测。在实际应用中,这种拟合能够在初步校准的过程中完成,之后便可以通过传感器的电阻变化得到驱动器的形态。
综上,本工作提出了一种简单的“贴附”策略,将作为大变形传感器的柔性水凝胶集成在软机器上,同时可以实现水凝胶与软机器单独制备,为软机器精确控制与传感提供了简易可行的方法,对拓宽水凝胶及其相关柔性器件在软机器领域的发展和应用具有促进作用。
这一研究工作最近发表于Advanced Materials Interfaces。论文的第一作者为程思博,西安交通大学博士研究生,以国家公派联合培养研究生在哈佛大学工学院交流学习期间完成相关研究工作;共同作者还包括:Yashraj S. Narang,哈佛大学工学院博士研究生,杨灿辉博士,在哈佛大学工学院做博士后期间完成相关研究工作,现为南方科技大学力学与航空航天工程系助理教授。哈佛大学工学院Robert D. Howe教授和美国科学院院士、美国工程院院士、哈佛大学锁志刚教授为共同通讯作者。
论文信息及连接:https://onlinelibrary.wiley.com/doi/full/10.1002/admi.201900985
南方科技大学杨灿辉团队招收硕、博士研究生、博士后
南方科技大学杨灿辉助理教授目前正在组建新团队,招收硕、博士研究生、博士后等,和搭建新实验室;研究方向包括软物质材料力学行为,水凝胶器件,软材料粘接,新型软材料设计与制备,柔性传感器与驱动器等。欢迎对相关研究方向感兴趣的同学邮件联系:yangch@sustech.edu.cn。请在邮件中做必要的自我介绍。
- 上海交大张文明教授、同济李汶柏研究员 AFM:具有模态重编程功能的分级可重构软机器人 2024-10-21
- 华南理工大学江赛华教授课题组 Small:可光-热双模式协同作用驱动的意大利面结构软机器人 2023-12-11
- 昆士兰大学Thomas P. Davis、乔瑞瑞团队 NC:3D打印液态金属聚合物复合材料用于近红外光响应的4D打印软机器人 2023-12-04
- 中国科大人形机器人研究院 AM:挤-拉打印实现高界面韧性柔性传感器的一体化集成制造 2026-07-12
- UCLA 陈俊教授 Nature Sensors 综述 2026-07-09
- 陕科大强涛涛、任龙芳教授团队 AFM:具有应变传感和溶剂触发报警的双模态仿生自修复聚氨酯基离子凝胶传感器 2026-06-22
- 杭师大朱雨田教授、陈建闻副教授/南开刘遵峰教授 AFM:基于多尺度亲水-疏水界面超快响应与超大形变的湿气响应Janus纤维驱动器 2025-10-18
